未来方向盘技术
无人驾驶作为大家一致公认的未来汽车发展的方向,受到了各个大小公司的热烈追捧。目前,主流的无人驾驶等级划分采用SAE的规定,SAE J3016的最新定义无人驾驶分为Level0-Level5,共6个阶段。其中level0-2主要还是驾驶员主管的阶段,从Level3开始逐渐实现部分自动驾驶功能。
下面有一张图可以简单的区别出这几个等级对于开车的人的区别:
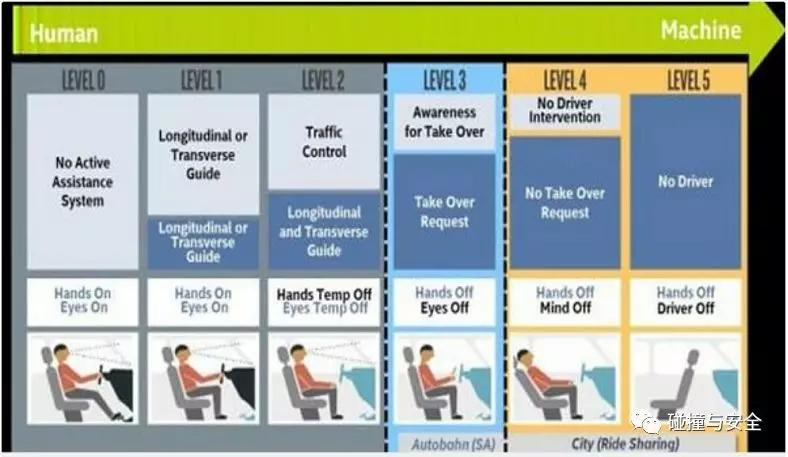
从上图可以知道,从level2开始,驾驶员的眼睛和手就不需要时刻的关注到驾驶的路况和方向盘上,虽然人看上去是轻松了,但是因为涉及到各个路况(ODD)和操作匹配问题,行车路况和行车操作的情况变得非常复杂。作为直接和驾驶员接触的最近的单元,方向盘需要承载检测/提醒驾驶员的重任。
从这个角度来说,行业内提出的方向盘的设想/概念就有以下这些:
振动方向盘
方向盘内的振动控制单元发出指令启动振动机构中的马达,马达带动偏心块旋转,从而使方向盘轮缘产生振动,从而达到提醒驾驶员的目的。这是一个提醒功能,可以配合设计意图/传感器连接,预警危险(车道偏移,会车碰撞预警,盲点检测提醒,或者驾驶员疲劳的时候作用)。

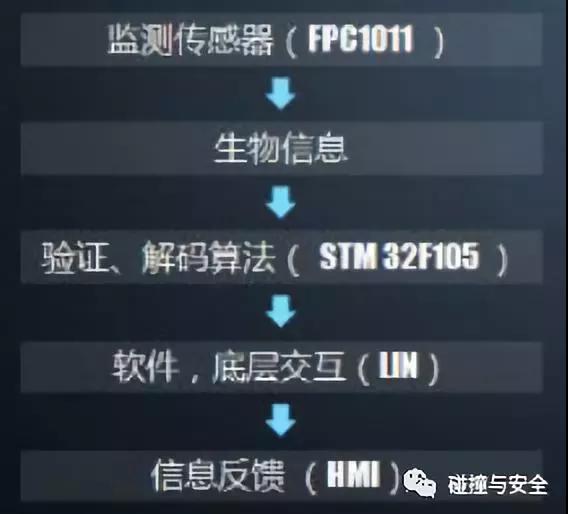
HOD离手检测触感提醒
薄膜状传感器包覆在皮革下方,PU之上, 连续监测驾驶员手部抓握压力状态,反馈给 ECU 进行分析。ECU根据驾驶习惯分析是否处于异常,并通过警示灯、警示声音或震动来提醒驾驶员。这个功能看上去没什么用的赶脚,但是和振动发现配合起来就可以做驾驶员专心驾驶的提醒,当你想要打瞌睡的时候,振你一个哆嗦没商量!和自动驾驶配合的话,就可以做自动驾驶和手动驾驶的切换开关。所以,此功能乃level3级的必备功能。

光传感方向盘
方向盘轮缘集成有传感器的光学部件,通过红外传感技术,实现电话开/关,音量调节,自适应巡航控制,自动驾驶等诸多操作。产品说起来很酷炫,毕竟可以有灯光效果,理论上可以同时实现离手检测的功能。
但是说实话,如果轮缘上集成了这么多不同的传感器,作为一个多动星人,我很担心手会没地方放,或者误触发不需要的功能,还是期待未来布置和设计合理化。
然后,检测方向盘的工作搞定后,我们广大驾驶员同志的乘车时间就空下来了。乘着这个短暂的闲暇时间,我们可以考虑改善下驾驶的便捷和舒适性了。从这个角度出发我们可以有下面几个开发方向:
健康检测
古人有云,经济基础实现上层建设,古人又有云,保暖思那啥,意思是,我们凡人不会满足于现状,总会有更高的追求。转念想想甄嬛华妃一日三请平安脉的优良传承,我们还是有必要在方向盘上做一个健康检测的功能滴。原理呢就是在方向盘里布置各种传感器来检测心率,皮肤的温度,阻值,数据处理后确定驾驶员的疲劳状态和压力状态。

指纹识别
把用户设置与指纹绑定,实现自动配置用户设定(媒体信息,座椅反光镜,方向盘等)

仔细想想,我们做自动驾驶的最终目标是什么!就是什么都不用做啊!当我们完全实现了自动驾驶之后,我们还要方向盘干什么?干什么!丢掉它!
然而,我们还要考虑一些驾驶爱好者的想法,我们还可以这样操作:
可折叠方向盘(level4+)
简单来说就是折叠床,折叠自行车一样一样的,想用的时候拿出来,不想用的时候收进去。这样说起来感觉有点low,车子都可以自动驾驶了,方向盘还要手动折叠?不合理不合理。那么来看一下这个概念:方向盘可以靠一个按钮来实现收缩。不过现在只能看看概念图过过瘾啦,毕竟人家还只是个概念。

遥控器
当车子完全可以自动驾驶后,理论上我就可以靠几个按钮实现所有功能,那么我们是不是就可以玩真人版的极品飞车游戏啦!

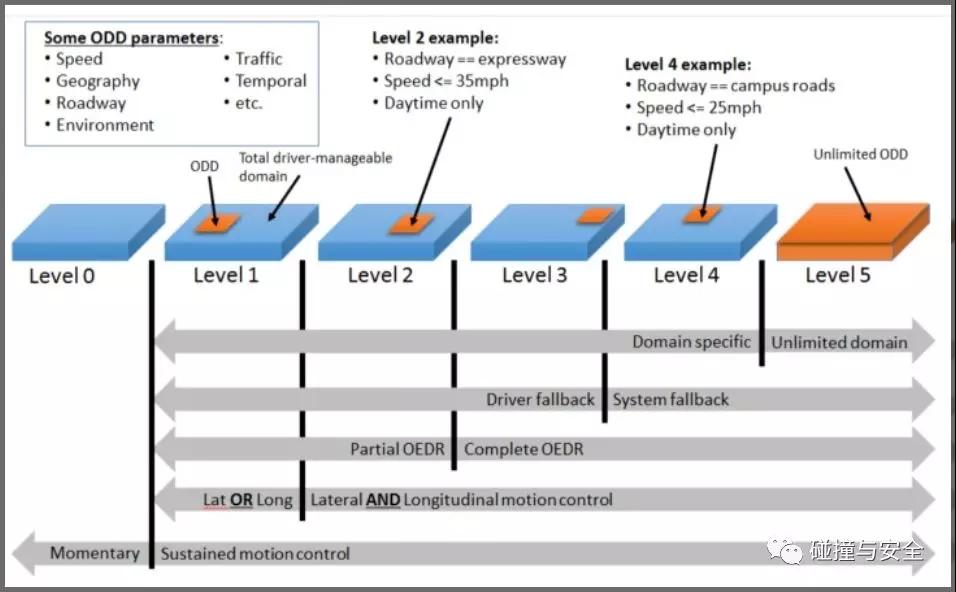
最后,贴一下自动驾驶的分级区别:
注释:
DDT(Dynamic driving task):动态驾驶任务,指汽车在道路上行驶所需的所有实时操作和策略上的功能,不包括行程安排、目的地和途径地的选择等战略上的功能。
ODD(Operational design domain):设计适用域,指自动驾驶系统被设计的起作用的条件及适用范围,例如车速、交通状况、道路类型、天气、环境等。
ODER(Object and event detection and response):检测和应对周围环境。












![]()
2001-2009 Vogel Industry Media版权所有 京ICP备12020067号-15 京公网安备110102001177号


获取更多评论