纯电动汽车传动系统参数匹配及优化

着国家对新能源汽车企业的鼓励与支持,一大批新造车势力如雨后春笋,传统汽车企业也在逐步向新能源汽车过渡。电动汽车具有胜过传统内燃机车辆的许多优点,例如行驶过程零排放、高效率、低噪声。在能源危机及环保问题日益突出的局面下,推行交通工具向新能源转型势在必行。在电池效率问题得到有效解决之前,如何合理地选择这些部件及有关参数,使部件匹配达到最优。在相同蓄电池条件下,使车辆更好地满足动力性和经济性的需求,一直是行业研究的重点目标。
本文在完成2档AMT纯电动汽车传动系统参数初步匹配的基础上,利用人群搜索算法,以改善动力性和提高整车续驶里程为目标,对减速器速比进行了优化,并结合AVL Cruise软件对减速器速比优化结果进行仿真分析,对比优化前后仿真结果,实现电动汽车动力性和经济性的有效提高。
1 整车参数及性能目标
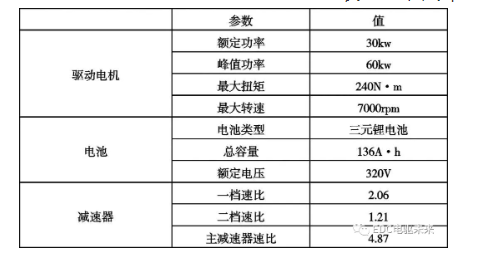
某电动车型的主要技术参数及性能要求指标如表1和表2所示。
表1 整车参数
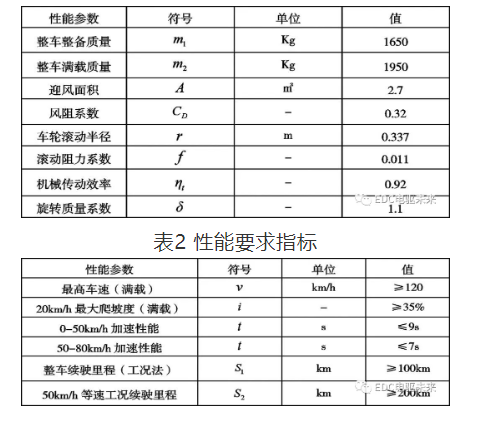
表2 性能要求指标
2 动力系统参数匹配
2.1 驱动电机的参数匹配
2.1.1驱动电机的功率
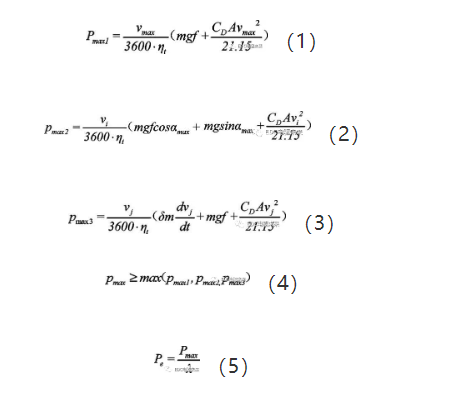
本文采用的是永磁同步电机,驱动电机的峰值功率应同时满足所设计的最高车速、最大爬坡度、加速性能要求。
 (1)
(1)
 (2)
(2)
 (3)
(3)
 (4)
(4)
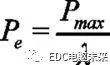 (5)
(5)
上式中:vmax为最高车速;m为整车装备质量;A为迎风面积;CD为风阻系数;αmax为最大爬坡度;f为滚动阻力系数;vi为最大爬坡度时的车速,vi=20km/h;vj为汽车在NEDC工况中从100km/h加速到120km/h时的末速度,vj=120km/h;Pe为驱动电机的额定功率;λ为电机的过载系数,取2。
2.1.2驱动电机的扭矩
汽车在1档驱动下,满足最大爬坡度要求,则驱动电机的最大驱动力必须大于此时的道路行驶阻力,则:
 (6)
(6)
式中αmax为最大爬坡度;vi为最大爬坡度时的车速,vi=20km/h。
2.1.3驱动电机转速的确定
纯电汽车的最高车速由整车控制系统决定以及受到驱动电机的最高转速的限制,其中电机的最高转速与理论最大车速对应的关系如下:
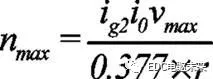 (7)
(7)
式中nmax为电动机的最大转速,rpm。
2.2 动力电池PACK组的匹配
纯电动汽车驱动能量的唯一来源是动力电池PACK组,PACK组容量的大小需满足整车的续驶里程的设计要求,以及电池组的最大功率限制着驱动电机的最大功率。
汽车以车速V匀速行驶时,电池组的总容量为:
 (8)
(8)
 (9)
(9)
其中Ub为电池组的电压;S为汽车的续驶里程;Pb-out为电池的输出功率;△SOC为动力电池pack的放电变化量;ηec为电机与控制器的传递效率,取0.9;Pv为汽车以速度V匀速行驶时电机的功率;η为电机与电池之间的传递效率,取0.9。
2.3 减速器速比的选择
减速器在汽车驱动行驶过程中起到减速增扭的作用,减速器速比的选择需以整车动力性指标为依据,即需满足整车的最高车速、爬坡度以及百公里加速时间。
2.3.1 两档AMT1档速比
减速器最大传动比imax为两档AMT低档速比ig1与主减速器速比io的乘积,由根据电机最大输出转矩Tmax、最大行驶车速vmax和最大爬坡度αmax确定:
 (10)
(10)
 (11)
(11)
 (12)
(12)
同时汽车在1档驱动行驶时,需要满足整车行驶的附着条件[4],则:
 (13)
(13)
式中Fz为汽车行驶时路面对车轮的法向反作用力;φ为附着系数,本文中取0.8。
2.3.2两档AMT2档速比
两档AMT2档的速比由汽车最高行驶车速Vmax、电机最大转速以及最大输出转矩Tvmax确定:
 (14)
(14)
 (15)
(15)
2.3.3档位之间的约束
2档AMT相邻两挡的传动比比值如果过大则会造成换挡困难,在设计减速器速比时一般比值不宜大于1.7~1.8,即0:
 (16)
(16)
2.4 电动汽车的匹配结果
根据汽车的整车参数及设计目标,匹配出汽车的各参数如表3所示。
表3 电动汽车匹配参数
3 电动汽车减速器速比优化
本文中在确定纯电动汽车的驱动电机参数和动力电池组容量后,需要对2档AMT速比进行优化以使整车的动力性和经济性达到最佳。由于动力性与经济性无法同时满足其最优要求,本文以车辆动力性作为约束条件,选取传动比为优化变量,通过优化2档AMT传动比提高汽车的经济性,使续航里程达到最大,从而将多目标优化转化为单目标优化[6]。
3.1 目标函数的建立
采用常用的NEDC工况,整个工况下电动汽车行驶的续驶里程S1(km)为:
 (17)
(17)
式中Wb为电池存储的能量(kW·h),W为整个工况下整车所消耗的总能量,L为一个循环工况下的里程,11.022km。
因为本文所选择的优化算法建立的目标函数是对目标函数求极小值点,所以要对续驶里程倒数化处理,则目标函数可以表达为:
 (18)
(18)
3.2 约束条件的建立
动力性约束包含最大车速、爬坡度、加速性能的约束。约束条件可表达为:
 (19)
(19)
 (20)
(20)
 (21)
(21)
 (22)
(22)
式中DIm ax为汽车1档时的动力因子;Ft为汽车的驱动力;Wf为汽车的滚动阻力;Ww为汽车的滚动阻力。
3.3 优化算法
(1)SOA算法简介
人群搜索算法 ( Seeker optimization algorithm, SOA)将搜索队伍作为种群,候选解为各搜索者所处位置,通过模仿人类在进行搜索行为时对位置和方向等的推理判断完成问题的最优求解。
在汽车传动系统优化领域的研究目标是开发可靠的全局优化算法,并对最优解收敛。由于目标问题存在着众多的局部极值,当面对复杂的优化问题,尤其是多峰、多极值的模态函数优化问题时,目前已有的全局优化算法不可避免地存在着早熟、收敛速度慢等缺陷。SOA 算法对齿轮减速器进行优化设计,在同 PSO、GA 算法和传统设计方法的结果进行对比分析,优化结果表明,SOA 算法具有更快的收敛速度和更高的收敛精度。
(2)搜索步长
根据不确定推理可得步长:
 (23)
(23)
式中αij为j维搜索空间的搜索步长;δij为高斯隶属函数参数。
(3)搜索方向
搜索方向的确定由搜寻个体利己方向、利他方向、以及预动方向这3个方向随机加权几何平方决定,其表达式为:
 (24)
(24)
式中 为搜寻个体利己方向;
为搜寻个体利己方向; 为搜寻个体利他方向;ω是惯性权值;
为搜寻个体利他方向;ω是惯性权值; 为搜寻个体预动方向;φ1和φ2是[0,1]内的常数。
为搜寻个体预动方向;φ1和φ2是[0,1]内的常数。
(4)个体位置的更新
人群搜索算法确定搜索步长以及搜索方向后,需要进行位置更新:
 (25)
(25)
 (26)
(26)
(5)SOA算法的实现
第一步:确定可行域后,在域内随机生成100×3的位置矩阵;第二步:计算出目标函数在每个位置上的值;第三步:计算出每一个个体在位置矩阵里每一维的搜索步长dij(t)和搜索方向αij(t);第四步:完成个体位置的更新。若搜索结果满足要求则停止搜索,不满足要求则按照以上步骤重新计算极值直到结果满足条件为止。
3.4 传动比优化结果
运用上述的优化方法对目标函数进行优化求解,种群规模和最大迭代次数均为100,权重值Wmax=0.9,Wmin=0.1,在MATLAB中编程运行后得到优化后的速比为:ig1=2.36,ig2=1.19,i0=4.65。
4 AVL Cruise软件仿真分析
基于AVLCruise软件搭建纯电动汽车主要部件以及整车系统的Cruise模型如下图1。
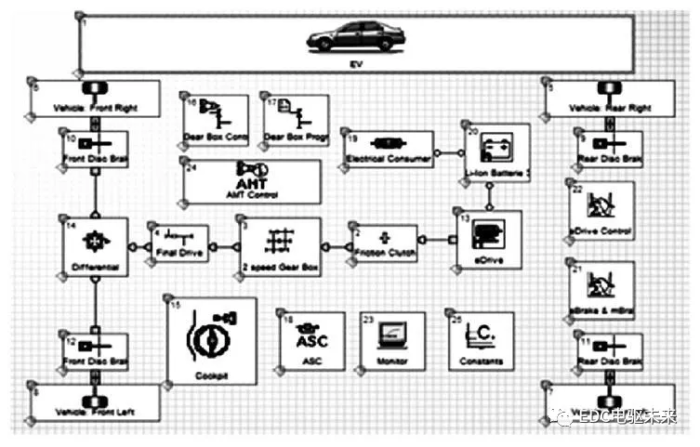
图1 整车仿真模型
4.1 优化结果前后对比
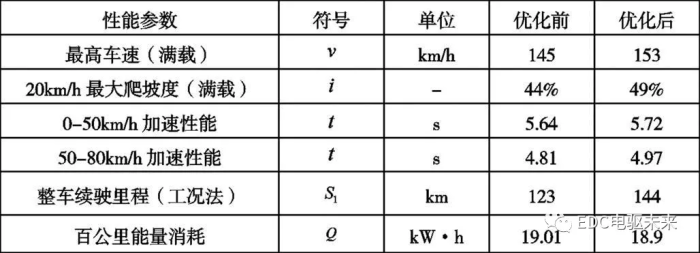
仿真时选取新欧洲城市驾驶循环工况NEDC工况来计算汽车百公里能耗以及建立爬坡性能工况和满载加速性能工况。传动比优化结果前后对比如下表中所示。
表4 优化前后汽车性能对比结果
4.2 循环工况法续驶里程
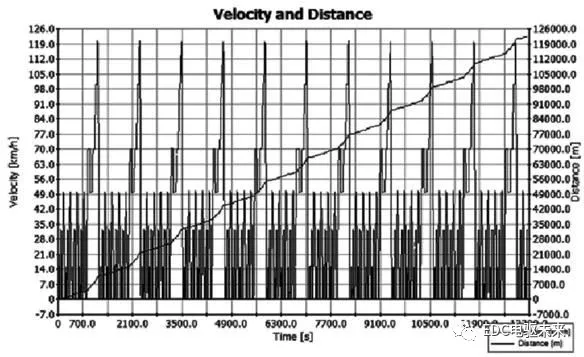
图2 优化前的续驶里程
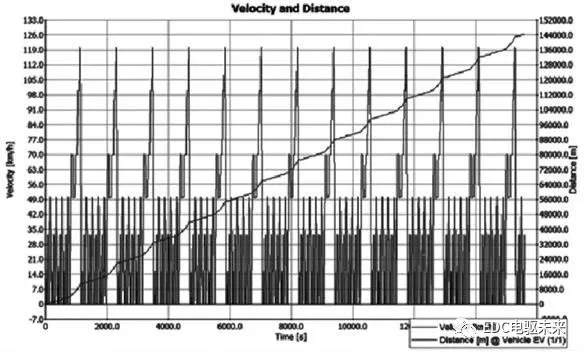
图3 优化后的续驶里程
如图2和图3所示,在电池充满电后,SOC值从90%下降到30%时,减速器传动比优化前后汽车在NEDC工况下整车的续驶里程在Cruise软件中的仿真结果。
4.3 等速工况法续驶里程
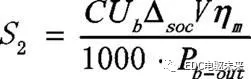
纯电动汽车充满一次电以50km/h等速工况下行驶,SOC值从95%下降到30%时汽车的理论的续驶里程为:
 (27)
(27)
计算出50km/h等速工况下的续驶里程为252km。仿真结果如图4。
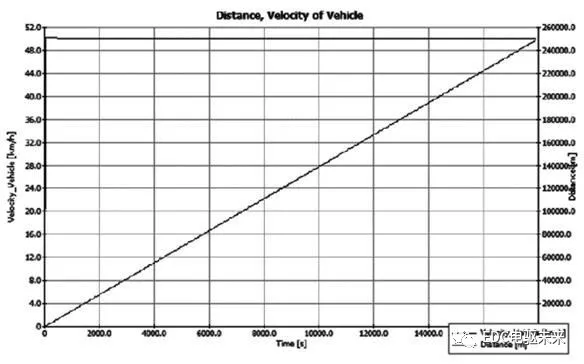
图4 优化后的续驶里程
50km/h等速工况下的续驶里程为248 km,与理论计算结果相差不大。
5 结论
本文针对两挡AMT变速器纯电动汽车,根据汽车性能指标要求进行动力学分析,确定了电机、电池和减速器的主要参数。以整车动力性和经济性为约束目标,利用人群搜索优化算法对变速器传动比进行优化。基于AVL Cruise软件建立整车模型,进行相关动力性和经济性的仿真分析。对仿真结果进行对比分析表明,运用优化参数的车辆具有更好的综合性能。因此,人群搜索优化算法在汽车传动系统参数匹配优化中具有良好的实用性。












![]()
2001-2009 Vogel Industry Media版权所有 京ICP备12020067号-15 京公网安备110102001177号


获取更多评论