助力自动驾驶
可靠的传感器是
自动驾驶的必要前提
用于探测附近目标的传感器是自动驾驶车辆的关键部件。这些传感器包括摄像头和激光雷达,但以毫米波雷达传感器为主。每年汽车雷达的产量数以百万计。这些传感器在高端车辆上是标准配置。如今,汽车雷达传感器主要用于提高驾驶舒适性和预防交通事故。支持自适应巡航控制的雷达传感器大多工作在 76 GHz 至 77 GHz 的频率范围内(1 GHz 带宽),以感应前方远距离外的其他车辆和物体。传感器的高级功能,尤其是感应附近目标的功能(如变道辅助和盲点检测)需要更大的带宽来实现更高的距离分辨率,这些要求可以在 77 GHz 至 81 GHz 的频率范围内得到满足。此外,汽车频段扩展至 81 GHz 还有助于减少无线电干扰。
更多出于外观而非功能上的考虑,汽车雷达往往会安装在雷达罩(雷达天线罩)背后,射频信号能透过其材料进行传输。汽车车标就经常用于这一用途,而保险杠也是雷达很好的藏身之处。过去,车标的主要作用是宣传品牌,并没有什么其他重要用途。而现在,雷达罩这一用途使得车标更多地承担了射频组件的功能。如果在设计中没有考虑到这一点,就会对车标背后雷达的探测性能和准确性产生非常不利的影响。
具体来说,如果品牌车标三维形状的局部材料厚度发生了变化,可能会对工作于毫米波频带的雷达射频性能造成严重问题,而保险杠通常涂有金属漆面,可能导致高频衰减。因此,为了确保雷达的可靠性,必须验证雷达罩的材料特性,并检查其对雷达信号的影响。自动驾驶不允许汽车传感器中存在任何不确定性和风险,原因在于由此产生的任何误差都无法通过后续处理得到充分纠正。因此,主机厂及其供应商需要新的测量手段来评估雷达罩的雷达一致性。
雷达罩可能大幅降低
雷达性能
汽车雷达传感器主要采用调频连续波 (FMCW) 信号。由于传播延迟和多普勒频移的存在,传感器可以测量和分辨多个目标的距离和径向速度。根据天线阵列特性的不同,还有可能测量和分辨方位角甚至仰角。经过检测和跟踪后,传感器会对信号进行处理,生成包含被测物体位置和速度以及类型信息(行人还是汽车等)在内的目标列表。此列表会发送到车辆的电子控制单元,用于对车辆的操控做出实时决策。因此,这些数据的准确性和可靠性对车辆及乘客的安全至关重要。
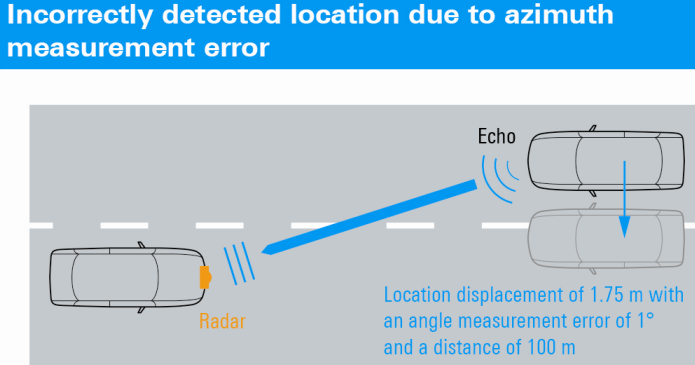
由于方位角测量误差,目标定位错误。自动驾驶车辆控制器可能会做出致命操作。
雷达的精度取决于多种因素,包括硬件组成、软件处理和雷达回波本身。信噪比 (SNR)低的回波信号参数的测量精度不及 SNR 较高的回波信号。此外,雷达罩的多径传播和失真等效应也会对测量精度产生巨大影响。方位角的测量如果不准确,会导致目标出现偏离实际位置的情况。如图 1 所示。哪怕雷达传感器的角度测量误差仅有 1°,也会导致 100 m远的目标出现 1.75 m的横向偏移。这一偏移量可能会导致目标被解读为处于另一条车道上。为确保运行的可靠性,这一级别距离下的角度测量误差必须远小于 1°。
汽车雷达存在的普遍问题
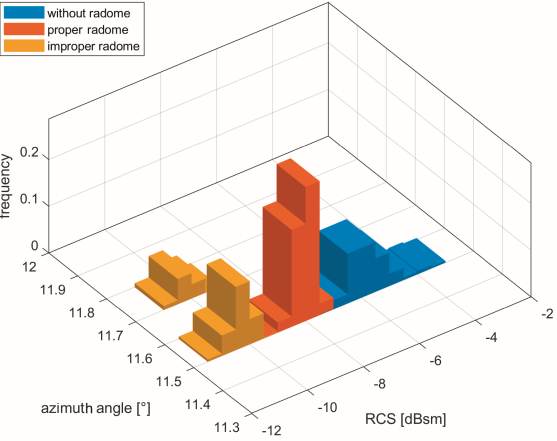
不同雷达罩对雷达散射截面积 (RCS) 和入射角的影响。不合适的雷达罩会导致角度误差。
图 2 展示了在对真实汽车部件进行的测量中,方位角偏移所产生的影响。在一款现成的商用车载雷达前出现了一个静态目标,距离为 12.4 m,方位角为 11.5°。图表展示了不同的雷达罩会对雷达散射截面积和入射角产生怎样的影响。
蓝色数值(即不带雷达罩的数值)可作为对比。可以看出,如果使用了合适的雷达罩(红色),就不会对预估的入射角产生任何影响。但受到双程衰减的影响,雷达散射截面积明显减小(示例中约为 2 dB)。如果使用了不合适的雷达罩(橙色),则平均雷达散射截面积较对比测量的结果降低约 4 dB,因而会难以检测到弱反射目标。不合适的雷达罩对入射角检测的影响也同样显而易见。入射角不再显示为恒定的 11.5°,而是在 11.5°和 11.7°间交替,导致信号处理单元无法获得准确的测量值。若使用这种雷达罩,汽车雷达就无法达到 0.1°的目标精度。
仅依靠雷达校准远远不够
现代雷达传感器会在接收机前端配备阵列天线,从而能够根据相控阵天线波束成形所测得的相位和振幅比来确定方位角(有时也包括仰角)。为了获得最优的方位角精度,每个雷达传感器都必须单独校准。以下是雷达校准的常用步骤。首先,将传感器安装到电波暗室的转台上。此时,通常会使用已知距离处的远场角反射器作为参考目标。然后,测量雷达天线方向图,并将结果存储在传感器的存储器中。该信息后续将用于检测算法,信号处理期间会进行校正计算,并会在运行过程中进行校正。
主机厂将校准后的雷达传感器集成到车内,通常位于车标或保险杠背后。由于信号在到达目标和反射途中一定会穿过雷达罩材料,因此会导致射频传输衰减两次。这一问题会缩小雷达的探测范围,如以下分析所示。
根据信号传播定律,发射信号的功率与距离 r 的平方成反比,也就意味着在往返的过程中,信号功率会以 1/r4的系数减少。对于一台 77 GHz 雷达,搭配 3 W 输出功率、25 dBi 天线增益、10 m²雷达散射截面积的目标以及−90 dBm 的信号检测阈值,根据公式计算,该配置下的最大探测距离为 109.4 m。如果雷达罩的双程衰减达到了 3 dB,那么同一款雷达的最大探测距离将减少 16%,仅有 92.1 m。
然而材料衰减并不是影响雷达性能的唯一因素。雷达罩材料的反射率和均匀性也同样重要。基底材料的反射(如涂料中金属颗粒的反射)和射频失配会在雷达罩内,即在靠近传感器位置产生干扰信号。上述干扰信号会被接收和下变频至接收机链路,从而降低雷达探测灵敏度。许多主机厂都试图通过倾斜雷达罩,将发射的雷达信号反射到其他地方,而不是直接返回接收机前端,从而减轻这种影响。由于本身设计的局限性,这种解决方案无法消除射频能量损耗而引起的寄生反射。
另一个问题在于材料的不均匀性,如杂质和密度变化,会干扰出射和入射波。失真的波阵面会导致角度测量的准确性降低。由于校准后的雷达可能安装在不同厂家生产的雷达罩背后,因此通过校准雷达传感器无法消除这一影响。
雷达罩的传统测试方法
雷达罩制造商通常会使用参考雷达(标准设备)来测试产品。在此类测试中,角反射器会安装在雷达前方预先规定的距离和方位角处(图 3)。然后在有雷达罩和无雷达罩的情况下进行差分测量,从而进行比较。当由雷达信号和回波信号电平确定的距离和方位角都在规定的限值内时,雷达罩就可通过测试。但这种方法仅适用于检查特定的方位角,很容易漏掉雷达罩中的问题区域。

典型的标准设备试验布置
另一种测量方法的操作方式类似,但只需要一个反射器。这种方法将雷达传感器和雷达罩安装在转台上,在不同的角度重复进行测量。然后将转台上(地面实况)读到的实际角度与雷达测得的角度进行比较。该方法的准确度与转台的定位精度相当。但这种测试占用的时间较长,不适用于生产线测试。
R&SQAR 雷达罩测试仪的一键式定性测试
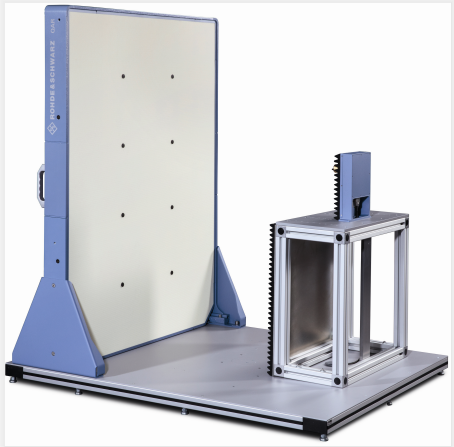
优质的 R&SQAR 汽车雷达罩测试仪。被测器件安装在台面前端。台面上的蓝色单元包含了用于传输测量的毫米波发射单元选件。
优质的 R&SQAR 汽车雷达罩测试仪(图 4)克服了传统方法的局限性。不同于传统的配备微型天线阵列的标准设备,该产品使用了大型的面板,配备数百个发射和接收天线,工作频率覆盖 75 GHz 到 82 GHz ,扩展了的汽车雷达频率范围。测试仪所“看到”的好比于配备了数百根天线的汽车雷达所能看到的。但借助于巨大的孔径,测试仪能够以更高的分辨率(毫米级精度)测量距离、方位角和仰角。这样高的分辨率能够将测量结果(即反射率)呈现为 X 射线图像,即便测试和测量经验有限的人员也能立即进行质量评估。与真实的雷达测量不同,测定雷达罩的特性无需耗时的测量程序,与相机拍照类似,R&SQAR 在一次采样中即可获得结果。
被测的雷达罩需放置在面板前方的指定区域。测量项目有两种,一种是测定被测器件的反射率,另一种是测定其透波率。
首先是为了确定雷达罩材料反射了多少能量而测量反射率,即无法通过雷达罩的能量。反射会降低雷达性能,甚至如上文所分析的,会影响雷达正常工作。由于各种原因,如材料缺陷、气泡杂质、不同材料层间多余的相互作用或材料成分过量,某些区域可能具有更高的反射率。这种测量方法会根据幅度和相位,将所有反射信号进行关联,从而获得空间分辨测量结果。可视化的测量结果实现了对被测器件的反射行为进行直观且定量的评估。
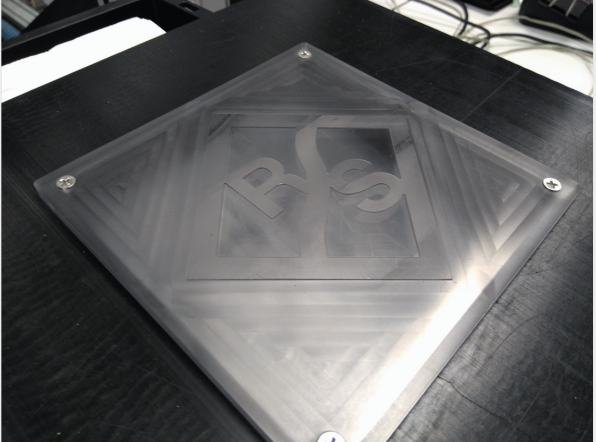
带有罗德与施瓦茨徽标的演示用雷达罩仅高于雷达罩体 0.5 mm。即使这种厚度上的微小增加也会导致 77 GHz 频率上的失配(图 6)。
出于演示的目的,我们专门制作了一个演示用的雷达罩,其中包含打磨成不同厚度的罗德与施瓦茨徽标(图 5)。
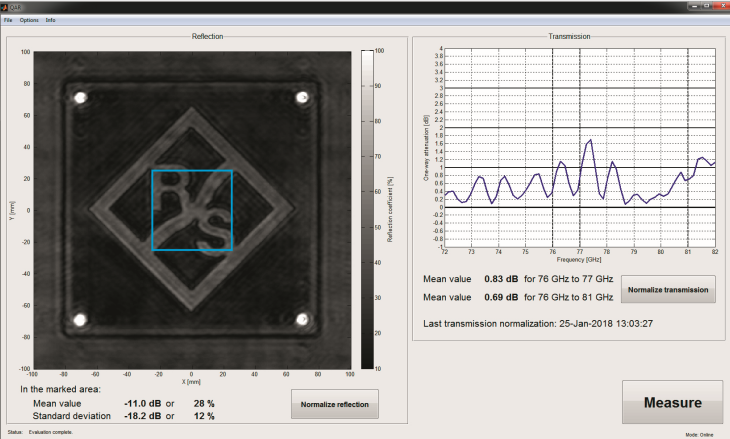
高分辨率毫米波反射图像(左)和单向衰减(右)。徽标中的蓝色轮廓代表了测试发射机或雷达的辐射散射截面积。该面积可用于进行评估。
图 6 中的高分辨率雷达图像展示了被雷达罩遮盖的雷达传感器能看到什么。亮度等级代表了其反射率。区域的亮度越高,表示反射的雷达信号越多。金属物体显示为白色(四个角上的螺丝)。清晰可见的徽标轮廓表明整体图像的局部反射率较高,且分布非常不均匀。徽标中多出 0.5 mm 厚度的区域足以大幅降低雷达在道路上的性能。
在本示例中,通常用于安装传感器的雷达罩中间区域,其平均反射率为−11.0 dB,标准方差为−18.2 dB。在许多应用场景下,这一数值明显超出了雷达可靠运行的范畴。在具体实践中,预期反射率取决于雷达单元的灵敏度和要覆盖的最大探测范围。
其次是测量雷达罩材料的频率匹配和衰减。位于被测器件(图 4)背后的发射单元会扫描整个工作频率范围。这一测量方式实现了对雷达罩传输频率响应的精确评估。频率响应能够提供雷达工作频率范围内,关于被测器件射频匹配的详细信息。该信息与雷达单元所使用的实际信号波形无关,因此适用于能够安装在雷达罩背后的所有类型的雷达。
图 6 中右侧的图表展示了演示用雷达罩的测量结果。由于该雷达罩在 76 GHz 到 79 GHz 频率范围内具有很高的带内波动,因此不适合于该频段的雷达。
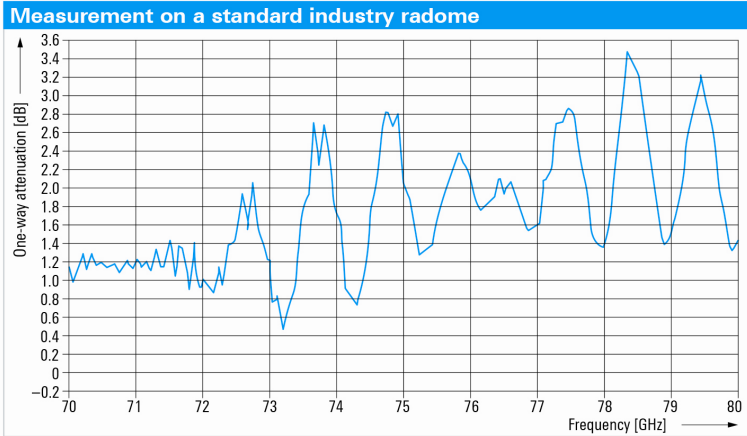
对具有复杂 3D 设计的商用多层雷达罩进行传输测量。
汽车工业中一个真实的 3D 雷达罩上所进行的传输测量得到了类似的锯齿状曲线,如图 7 所示。该雷达罩存在下列多种性能问题:
处于 71 GHz 左右频率范围的匹配性能,其适用性不及 76 GHz频段。这种情况通常由于雷达罩某些材料层的厚度增加而引发。
79 GHz 频段不稳定的衰减变化表明驻波比显著增加。这种情况表明雷达罩的边界处存在反射,并且具有很强的干扰影响。
整体单向衰减相对较高,导致探测范围明显缩小。
总结
自动驾驶要求雷达对周围区域目标的探测必须可靠,即不得有误差。可靠性能否得到保障,不仅取决于雷达的质量,更取决于其安装情况。雷达通常安装在品牌车标或保险杠背后。这些车身部件(雷达天线罩)会导致信号降低以致无法探测到目标或探测到目标在错误的位置。如今,此类部件不仅要满足其最初的用途,还要具有规定的射频特性。为了验证这些特性,需要准确实用的测量方法。R&SQAR 测试仪提供了一种速度和效果都优于标准设备的汽车雷达罩质量评估方法。R&SQAR 能够测量被测器件的透波率,揭示雷达罩设计的基本适用性,同时还能测量反射率,形成 X 射线型的可视化图像,即便不是专业人士也能够可靠地对产品进行通过/不通过评估,尤其适用于生产线终端测试。
作者:R&S公司 Steffen Heuel 博士;Tobias Köppel;Andreas Reil;Sherif Ahmed 博士
AI《汽车制造业》
龚淑娟
李峥
热点文章
-

智能汽车场景化开发:系统融合与 用户体验的协同研究
2026-07-20
-

“泰钽”来了!开启智能越野3.0时代
2026-07-22
-

基于传动效率的多模复合功率分流混合动力系统模式控制研究
2026-07-21
-

乘用车混合动力总成系统设计和性能仿真研究
2026-07-22
-

动力系统主导车市质变,增程器迈入系统竞争
2026-07-23
-

基于深度学习的电驱实验系统设计
2026-07-24
-

-
基于深度学习的电驱实验系统设计
针对传统永磁同步电机建模方法难以兼顾精度与实时性的问题,本文基于深度学习技术提出一种融合物理约束的永磁同步电机降阶模型,通过深度神经网络实现对电机非线性电磁特性的精细化建模。围绕所提降阶模型,搭建了电驱实验系统,并将该模型集成至电驱系统中,实现了实时硬件在环验证。在不同工况下对降阶模型和传统dq轴解析模型开展实验分析,结果表明,所提出的基于深度学习的永磁同步电机降阶模型在保证高精度建模的同时,实现了更好的动态性能。该模型支撑的实验系统可用于电驱系统的快速仿真与控制算法研究,具有良好的工程应用前景。
作者:
-
动力系统主导车市质变,增程器迈入系统竞争
-
“泰钽”来了!开启智能越野3.0时代
-
乘用车混合动力总成系统设计和性能仿真研究
-
基于传动效率的多模复合功率分流混合动力系统模式控制研究
-
智能汽车场景化开发:系统融合与 用户体验的协同研究





评论
加载更多