基于CAN总线的城市客车信息集成控制系统
1 引言
随着电子技术的不断发展,汽车电子技术也迅速的发展了起来,汽车上各种电子控制单元的数目也不断地增加,连接导线显著增多,因而提高控制单元间通信的可靠性和降低导线成本已成为迫切需要解决的问题。在20世纪80年代,以研发和生产汽车电子产品著称的德国bosch 公司针对此问题开发了can总线协议,这种多主网络协议,它的基础是无破坏性仲裁机制,使得总线能以最高优先权访问报文而没有任何延时。can作为标准车载网络技术,其在汽车网络化应用的进程中起着桥梁和纽带的作用,将城市客车信息集成采集提高到一个新的层次。
2 城市客车信息集成控制系统概述
城市客车信息集成控制系统是建立在汽车网络控制技术的基础上,从控制对象分,可以将城市客车信息集成控制系统分成动力传动电子系统、安全与底盘电子系统和车身电子系统。控制系统框图用图1表示。
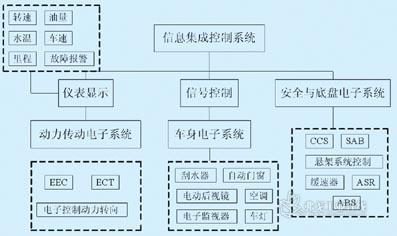
图1 城市客车信息集成控制框图
动力传动电子系统由eec(engine electronic control发动机电子控制)、ect(electronic control transmission电子控制变速器)、电子控制动力转向等组成
3 系统结构设计
3.1 信息集成控制系统
信息集成控制系统是整个城市客车信息集成控制系统的核心,其任务是综合应用汽车电子控制技术、车载网络技术和智能控制技术,实现城市客车各ecu的信息共享和关联实时控制,以达到整体提高城市客车安全性、舒适性的目的,减少对驾驶员技能的依赖度。
从信息交流角度看,城市客车信息集成控制系统分成动力总成控制子系统和车身控制子系统。动力总成控制子系统包括发动机控制系统、底盘控制系统。车身控制子系统包括车身电子系统和仪表盘控制系统。动力总成控制子系统内部信息交流频繁,对控制信息的实时性要求极高;而车身控制子系统信息的交流相对于动力总成控制子系统,实时性要求相对较低。动力总成控制子系统和车身控制子系统之间也存在信息交流。如果采用单总线结构,即所有ecu都连接在同一can总线上,两个子系统的信息传输叠加,必然会增加网络的负载,降低了控制信息的实时性。我们采用双总线结构,动力总成控制子系统采用高速can,信息传输速率达500kb/s,车身控制子系统采用低速can,信息传输速率达100kb/s,两者之间少量的信息交流通过网关实现。网关是城市客车信息集成控制系统的核心,也是综合控制的基础,主要功能是对各种信息进行分析处理,并发出指令,协调汽车各控制单元及电器设备的工作。城市客车信息集成控制系统的拓扑结构如图2所示。
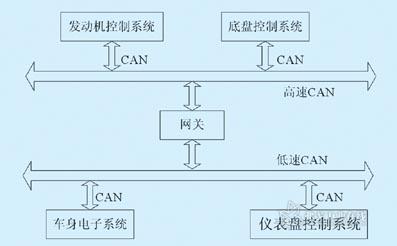
图2 城市客车信息集成控制系统拓扑结构
3.2 网关与总线接口
网关选用philips公司lpc2101微控制器,它是一款基于支持实时仿真的arm7tdmi-s cpu,并带有8kb和32kb嵌入的高速flash存储器。128位宽度的存储器接口和独特的加速结构使32位代码能够在最大时钟速率下运行。这可以使得中断服务程序和dsp算法中重要功能的性能较thumb模式提高30%。对代码规模有严格控制的应用可使用16位thumb模式将代码规模降低超过 30%,而性能的损失却很小。它内部集成2个can控制器,主要特性有:单个总线上的数据传输率高达1mb/s;32位寄存器和ram访问;兼容 can2.0b;全局验收滤波器可以识别所有的11位和9位rx标志符;验收滤波器为选择的标准标志符提供full can style自动接收。
can收发器选用philips公司的tja1050接口芯片,tja1050可以为总线提供差动发送性能,为can控制器提供差动接收性能。
lpc2101微控制器分别通过光电耦合电路和高速can总线收发器tja1050于两路can总线相连。两路 can的连接方式基本相同,can总线驱动器都采用带隔离的dc/dc模块单独供电。这样不仅实现了两路can接口之间的电气隔离,也实现了网关与can 总线的隔离。网关与总线结构如图3所示。
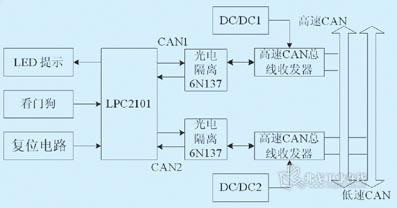
图3 网关与can总线接口结构
#p#副标题#e#4 系统软件设计
can/can网关的主要功能是实现两路can网段之间的数据过滤及转发,由于城市客车信息集成控制系统中对通讯实时性的要求,在进行软件设计时要做到数据存储和转发的时间尽可能短。为了达到这一要求,数据的接收采用irq方式,而且由于动力总成控制子系统的数据通信量明显高于车身控制子系统,因此将连接动力控制总成子系统的can1接受优先级设置最高,而连接车身控制子系统can2优先级次之,同时尽量精简中断服务程序,使系统的响应时间尽量的短。
由于传输速率不同,高低速can网络之间的数据传输是不同的。当高速can网络数据向低速can传输时,需要加入软缓存进行暂时的存储;当低速can网络数据向高速can网络传输时,可直接传输。整体流程如图4所示。
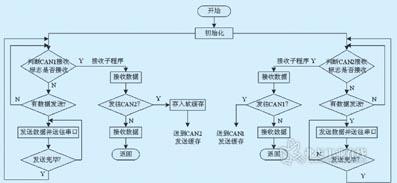
图4 高低速can网关通信流程
5 结束语
can总线以其高性能、高可靠性及其独特的设计越来越受到人们的重视,并被公认为是汽车控制网络中最有前途的总












![]()
2001-2009 Vogel Industry Media版权所有 京ICP备12020067号-15 京公网安备110102001177号


获取更多评论