改进的汽车安全气囊控制算法
1 引言
汽车的应用拯救了许多乘员的生命。但随着汽车的应用越来越多,气囊错误弹出的情况也时有发生,这样反而会威胁到乘员的安全,所以必须提高安全气囊的控制性能。因此,我们也需要进一步研究气囊。
汽车安全气囊技术发展到今天,其优劣已经不在于是否能够判断发生碰撞和实现点火,现代的安全气囊控制的关键在于能够在最佳时间实现点火和对于非破坏性碰撞的抗干扰。只有实现最佳时间点火,才能够更好的保护驾驶员和乘客。
最佳时间的确定在于当汽车发生碰撞的过程中,乘员向前移动接触到气囊,此时气囊刚好达到最大体积,这样的保护效果最好。如果点火慢了,则乘员在接触气囊的时候,气囊还在膨胀,这样会对乘员造成额外的伤害。如果点火快了,乘员在接触到气囊的时候气囊已经可以萎缩,则气囊不能对乘员的碰撞起到最好的缓冲作用,也就不能很好的起到对乘员的保护作用。
图1 气囊示意图
第二个是气囊的可靠性问题,也就是对于急刹车、过路坎和其他非破坏性碰撞时引起的冲击信号的抗干扰。汽车在颠簸路面上行驶或以很低速度的碰撞产生的加速度信号可能会令气囊误触发,一个好的控制系统应该能够很好的识别这些信号,从而在汽车产生非破坏性碰撞时不会使气囊系统误打开。
第三个就是气囊控制技术的基本指标,包括避免以下情况:①气囊可能在很低的车速时打开。车辆在很低车速行驶而发生碰撞事故时,只要驾驶员和乘员系上了安全带,是不需要气囊打开起保护作用的。这时气囊的打开造成了不必要的浪费。②当乘客偏离座位或座位上无人,气囊系统的启动不仅起不到应有的保护作用,还可能对乘客造成一定伤害[1]。
2 安全气囊点火控制的几种算法
1) 加速度法
该算法是通过测量汽车碰撞时的加速度(减速度),当加速度超过预先设定的阈值就弹出安全气囊。
2) 速度变量法
该算法是通过对汽车加速度进行积分从而得到加速度变化量,当加速度变化量超过预先设定的阈值时就弹出安全气囊。
3) 加速度坡度法
该方法是对加速度进行求导得到加速度的变化量作为判断是否点火的指标。
4) [2]
对加速度曲线在一定时间内进行积分,当积分值超过预先设置的阈值时,就发出点火信号。
2.1 移动窗积分算法
下面具体介绍一下移动窗积分算法,选定以下几个观察量作为气囊点火的条件指标。①汽车碰撞时的水平方向加速度(或减速度)ax。ax是直接反映碰撞激烈程度的信号,而且ax在最佳点火时刻的选取中起关键作用。②汽车碰撞时垂直方向的加速度ay,气囊控制系统加入ay对非碰撞信号能起到很大的抗干扰作用,当汽车发生正向碰撞时,ay与ax有很大的不一致性[3];而当汽车受到路面干扰,例如汽车与较高的台阶直接相撞时,ay与ax有很大的一致性[3],可以由此来判别干扰信号。
结合这几个量,得出一个判断气囊点火的最佳指标。
需要采样一个时间段(从碰撞开始)ax的值,根据这一系列的值才能判断碰撞的激烈程度. 气囊点火控制算法应在发生碰撞后20~30ms内做出点火判断,因为气囊膨胀到最大需要时间大概为30ms[4],在碰撞初速度为28.4km/h时,人体向前移动5inch到达接触气囊的时间大概为70ms,则目标点火时刻为70-30=40ms,所以气囊打开应该在碰撞后的40ms时刻,所以算法必须在20~30ms内做出点火决定。这样可以采样碰撞后的20个加速度值(频率是1kHZ)作为算法的输入值。而对于垂直方向也可以如此采样。则可得两组值:ax(1),ax(2)……ax(20);ay(1),ay(2)……ay(20).
移动窗算法中对ax的处理为(1)式: (1)
(1)
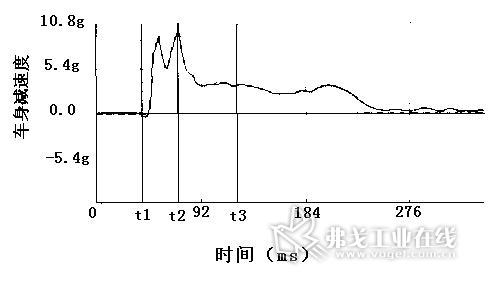
图2 移动窗口算法示意图
其中t为当前时刻,w为时间窗宽度(采样时间宽度),对ax(t)进行积分,得到指标S(t,w),当S(t,w)超过预先设定值时,则发出点火信号。
写成离散形式,如式(2): (2)
(2)
n为当前时间点,k为采样点数,f为采样频率。
加上垂直加速度之后,可以提高对路面干扰的抗干扰能力[3],形式如式(3):
 (3)
(3)
S(n,k,ρ) 为双向合成积分量,n,f,k如上定义;ρ为合成因数,表征两个方向加速度在合成算法中的权重。这种算法主要是考虑了汽车碰撞时的加速度因素,当加速度的积分达到一定值的时候,表示汽车的碰撞剧烈程度也到达一定值,会给乘员带来一定伤害。而且这种算法对于判断最佳点火时刻也是很有优势的,经过实验,利用这种算法得出的点火时刻离汽车碰撞的最佳点火时刻(利用摄像得出)仅差几毫秒[2],符合要求的精度。












![]()
2001-2009 Vogel Industry Media版权所有 京ICP备12020067号-15 京公网安备110102001177号


获取更多评论