配气机构参数化程序设计
本文基于Pro/Program的参数化程序设计方法,有效缩短了空间结构复杂的配气机构的设计周期,提高了设计效率。本文对配气机构零部件进行参数化建模,对配气机构进行参数化装配,实现了在装配体中对各零部件的远程控制以及在不同参数值下的运动仿真功能,设计过程简单化,程序化。
采用传统的设计,产品的设计周期长、成本高,许多问题只有在见到产品时才能够发现。因此,这样的设计方法无法满足快速更新的现代化大生产市场的需求。Pro/E三维实体建模设计系统是美国PTC公司提出的单一数据库、参数化、基于特征和完全关联的一种全新设计理念。对于空间结构复杂的配气机构,应用Pro/E提供的Pro/Program程序语言,能够快速准确地设计出满足客户需求的参数化产品,克服了利用Pro/ TOOL KIT进行参数化设计的高难度性,程序复杂性的缺点。本文正是基于这一思想提出了对配气机构的参数化设计方法。
配气机构的模型特征分析
1. 配气机构的拓扑结构关联性分析
配气机构工作装置是一个由凸轮轴正时齿轮、凸轮轴、惰轮轴、惰轮、曲轴正时齿轮、气门挺柱、摇臂轴、气门摇臂、气门弹簧和进气门等多构件组成的复杂空间机构(如图1所示)。
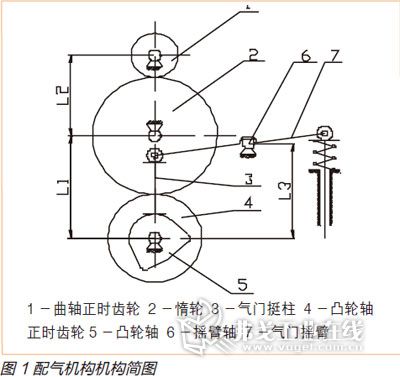
凸轮轴正时齿轮、惰轮和曲轴正时齿轮的模数、齿形角和螺旋角等变量相互关联,应在不同参数集的变量之间建立映射关系。
因此,在基于装配的参数化设计下,首先应确定凸轮轴正时齿轮、惰轮、曲轴正时齿轮和摇臂轴等零件的定位问题和约束关系;对于配气机构中的几何关联,采用自上而下的设计方法,实现数据从顶部模型传递到底部模型的参数化过程。
2. 基于Pro/Program的配气机构凸轮轴凸轮型线的生成
由于配气机构空间结构复杂,为了满足配气机构的动力性、工作平稳性和可靠性,对于凸轮型线的选择是其核心部分。大量的试验证明,函数凸轮气门挺柱的位移曲线、速度曲线和加速度曲线连续,配气机构运行平稳,有良好的运动和充气性能,使得振动和噪声大大降低。
由试验可知,低次方函数凸轮气门挺柱的运动规律表达式如式(1)所示:
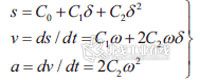
式中,δ为凸轮转角;s为挺柱位移;C0、C1、C2为待定系数,由边界条件确定。
由反转法原理和式(1)知,凸轮的工作轮廓线的方程式如式(2)所示:
式中,x、y为凸轮工作轮廓上某点的坐标;r0为基圆半径;s为挺柱位移;δ为凸轮转角。
通过对式(1)、(2)分析得知,凸轮型线由六部分组成:推程等加速阶段、推程等减速阶段、远休止阶段、回程等加速阶段、回程等减速速阶段和近休止阶段。由式(2)可推导出凸轮推程等加速阶段的方程式如图2所示。运用同样的方法可生成其他各段的方程式,最终生成的凸轮型线如图3所示。

基于Pro/Program的配气机构参数化实现
1. 配气机构的参数化建模与装配
本文分别对配气机构的凸轮轴正时齿轮、凸轮轴、惰轮和曲轴正时齿轮等进行参数化建模。以凸轮轴正时齿轮参数化建模为例,说明凸轮轴正时齿轮的参数化建模过程。
VERSION 4.0
REVNUM 8507
零TULUNZHOUZHENG
SHICHLUN的列表
INPUT
MN NUMBER
"请输入齿轮的法向模数=="Z NUMBER
"请输入齿轮的齿数=="ALPHA NUMBER
"请输入齿轮的压力角度=="B NUMBER
……
END INPUT
RELATIONS
……
D11=ASIN(2*B*TAN(BETA)/D)
IF HAX<1
D40=0.46*MN
D52=0.46*MN
ENDIF
……
END RELATIONS
通过再生命令按钮,运行以上程序,弹出如图4所示的再生对话框,根据提示输入新的参数值,将会生成新的凸轮轴正时齿轮,如图5所示。
下面列出配气机构装配体参数化设计的执行程序。此程序为原件与组件建立了一座沟通的桥梁,使设计人员可以直接在组件中选择元件的程序,不必一一打开元件程序,就可以让各个元件同时更新,迅速产生不同版本的组件。
VERSION 4.0
REVNUM 317255
组件
ZONGZHUANGPEITU的列表
INPUT
MN NUMBER
"请输入模数:"
……
F2 NUMBER
"请输入远休止角:"
F3 NUMBER
"请输入回程角:"
F4 NUMBER
"请输入近休止角:"
END INPUT
RELATIONS
D6:1=RB+59
D0:1=MN*(Z1/COS(BETA)+Z2/COS(BETA))/2
D1:1=MN*(Z2/COS(BETA)+Z3/COS(BETA))/2
D361:4=B-3
END RELATIONS
EXECUTE PART
TULUNZHOUZHENGSHICHLUN
MN=MN
Z=Z1
BETA=BETA
ALPHA=ALPHA
B=B
HAX=HAX
Z=Z3
……
END EXECUTE
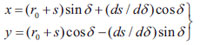
从程序中可以看出,图1中的惰轮、曲轴正时齿轮和摇臂轴等在装配体中定的位尺寸L1、L2和L3等是由程序中的关系式确定的,保证了零件之间装配关系的可靠性。程序编写完成后,通过Pro/E的“再生”命令执行编写的Pro/Program程序。此时按照Pro/E的主窗口中的提示信息输入新的参数值,完成参数值输入后,Pro/E将会生成一个新的符合设计人员要求的配气机构三维模型,如图6所示。
2. 配气机构的运动仿真
在Pro/E的机构模块中,通过“冲突检测设置”,检查配气机构装配体中各零部件是否干涉,以便进行合理的结构设计。进行运动学仿真测量进气门在凸轮不同参数下的运动规律,图7中(a)、(b)、(c)分别为进气门的位移、速度和加速度的运动规律。
通过比较在不同的设计参数下进气门的运动规律,能够得出设计参数的优劣,以使设计人员做出最优化设计。
结论
Pro/Program是Pro/E中一种重要且快捷的参数化实现方法,在组件模式下除了有零件模块的功能外,还可实现远程选择零件程序的功能。文中基于Pro/Program 建立了配气机构的参数化模型,当零部件设计方案修改后,可直接进行机构的运动仿真,还可对多个设计方案进行快速评估和比较,使配气机构产品设计更加快速、可靠,减少重复建模时间,缩短产品设计的周期,提高产品设计效率。












![]()
2001-2009 Vogel Industry Media版权所有 京ICP备12020067号-15 京公网安备110102001177号


获取更多评论