研究人员开发汽车雷达系统 可“看到”角落处的物体
据外媒报道,普林斯顿大学(Princeton University)研究人员利用通常用于追踪超速者和快速球的雷达,开发了一种自动系统,可以让汽车探测拐弯处,发现迎面而来的车辆和行人。
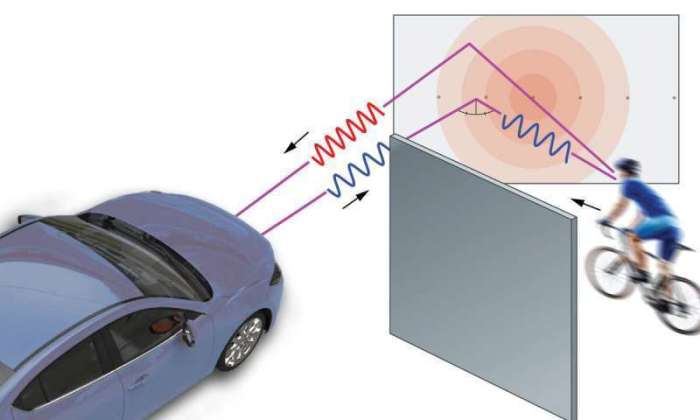
(图片来源:普林斯顿大学)
该系统可以轻松集成到现代车辆中,利用多普勒雷达将无线电波反射到建筑物和停放的汽车等表面。雷达信号以一定的角度撞击表面,其反射信号会反弹回来。雷达信号继续撞击隐藏在角落的物体,部分雷达信号会反射回车载探测器,使系统能够看到拐角处的物体,并判断物体是移动的还是静止的。
普林斯顿大学计算机科学助理教授、研究人员Felix Heide说,“这将使汽车能够看到被遮挡的物体,例如,让自动驾驶汽车看到危险的十字路口,而目前的激光雷达和摄像头传感器是无法实现这一点。此外,与激光雷达传感器相比,雷达传感器价格相对便宜,而且可以大规模生产。”
在日前发表的一篇论文中,研究人员描述了该系统如何区分包括汽车、自行车和行人在内的物体,并判断其方向和速度。作者写道,“我们提出的方法能在现实世界的自动驾驶场景中,为车辆提供行人和骑行人碰撞预警。”
近年来,工程师们开发了各种传感器系统,使汽车能够探测道路上的其他物体。其中许多依靠激光雷达或使用可见光或近红外光的摄像头,这种防止碰撞的传感器在现代汽车中很常见,但是光学传感很难用于发现汽车视线之外的物体。在早期的研究中,Heide的团队利用光看到隐藏在角落的物体,但由于这些方法需要高功率激光器,而且只能在较短射程内使用,因此无法用于汽车。
在进行早期的研究时,Heide及其同事们试想是否有可能利用成像雷达,而不是可见光,来创建系统,以检测汽车视线之外的危险。对于雷达系统而言,平滑表面的信号损耗要低得多,而且雷达是一种经过验证的跟踪目标的技术。但是雷达的空间分辨率(用于描绘汽车和自行车等隐藏在角落的物体)相对较低。然而,研究人员认为,他们可以创建算法来解释雷达数据,从而使传感器发挥作用。Heide表示,“我们开发的算法非常高效,适用于当前的汽车硬件系统。”
为了让系统区分物体,Heide的团队处理了部分雷达信号,而标准雷达认为这些信号是背景噪音而不是可用信息。该团队应用AI技术改善处理并读取图像。论文的主要作者之一、计算机科学研究生Fangyin Wei表示,该系统的计算机必须学会从非常少的数据中识别骑自行车的人和行人。
Wei解释道,“首先,我们必须检测是否有物体存在。如果有,它重要吗?是骑自行车的人还是行人?然后我们必须确定其位置。”Wei还表示,该系统目前可以探测行人和骑自行车的人,因为工程师们认为这些对象体积小、形状和运动方式多样,最具挑战性。该系统也可以进行调试,用于检测车辆。
Heide表示,研究人员计划在雷达和信号处理改进应用的多个方面继续研究。他说,该系统有潜力从根本上提高汽车的安全性,其依赖现有的雷达传感器技术,因此有望部署到下一代汽车中。Heide还称,“该系统肯定会经历非常严格的汽车开发周期,需要大量开发设计,才能整合到车辆中,并推向市场。”












![]()
2001-2009 Vogel Industry Media版权所有 京ICP备12020067号-15 京公网安备110102001177号


获取更多评论