详解为何真正的自动驾驶离不开激光雷达
当前,国内外对于初级自动驾驶L3的研发已经进行的如火如荼,比如以国产长安汽车首发的自动驾驶功能,还有一汽、广汽的量产步伐也紧随其后。然而,对于有限自动驾驶L3而言,并未能真正意义上的实现完全解放驾驶员。原因是需要限定比较严苛的ODD,且即便处于ODD下也智能允许驾驶员在其可处理的范围内脱手脱眼,而实际情况是,很多突发情况出现在ODD内时,系统仍然需要驾驶员及时接管车辆。这里的突发情况包括:
1)临时出现的施工路段;
2)前方突发掉落的物体;
3)异形车辆(如自行车、摩托车、行人等)突然减速或切入;
4)突发视线变暗或炫目。
对于当前正在研发的自动驾驶功能而言,基本都是采用的全摄像头或摄像头+毫米波雷达两种方案实现,该两种方案对于自动驾驶常规场景的识别与处理基本没有问题,识别率甚至可以达到99%,但是针对如上列举的一些场景,如上两种方案将会在一定程度上失效,提示驾驶员接管车辆,甚至有些时候由于识别过晚,连提示驾驶员接管的时间都不够了。这样会显得所谓的“自动驾驶系统”不够安全,也不能真正为驾驶员带来信心感。为了处理以上极端工况,引入激光雷达就显得尤为必要了。
本文将针对性的讲解激光雷达识别原理及如何破解自动驾驶极限工况识别问题。
一
激光雷达识别原理
激光雷达(LIDAR)是一种光学测量原理,用于定位和测量空间中物体的距离。基本上,它类似于RADAR系统,但是LIDAR不使用微波,而是在可见光谱内使用紫外线,红外线或光束。除了作为基本任务的距离测量外,LIDAR传感器还可用于有限的视觉检测,即通过分析光强度来确定物体,通过分析反射的LIDAR脉冲的形状来进行能见度测量,由于背景照明在白天和夜晚之间昼夜检测明显不同,也可以进行污染检测和速度估算。
1)距离测量
使用红外传感器时,有几种距离测量方法。汽车上最常见的是“飞行时间距离测量”。在发射和接收光(激光)脉冲之间经过的时间与测量系统和被检测物体之间的距离成正比。
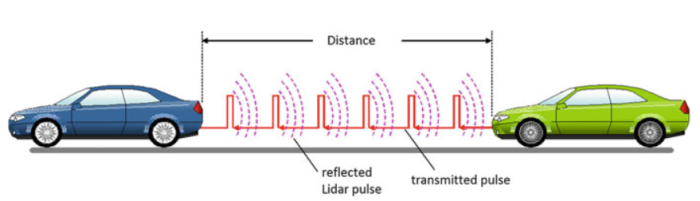
通过“飞行时间测量”,可以传输一个或几个光脉冲;它们由可能存在的对象反映出来。直到接收到反射信号为止的时间与距离成正比。在光速为300,000 km / s(在空中)的情况下,距离50 m处的物体要测量的时间约为3x10-7 s或333 ns。这是典型的驾驶情况,其中“速度= 100 km / h,距离=一半的传播里程”, 即由于发射的光脉冲传播的距离是传感器与障碍物之间距离的两倍,因此发送和接收之间经过的时间是到对象的距离的两倍。则距离测量相应的表示方式如下:
其中d表示以m为单位的距离,C0表示光速(300000m/s),T表示时间(s);
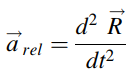
固定的单个物体(例如车辆)的反射脉冲具有高斯曲线的形状。
2)速度测量
原则上,激光雷达系统使用多普勒效应来确定检测到的物体的相对速度。然而,在光谱中测量多普勒频率的需求需要增加相关的成本阻碍了其实现性。
因此,理想情况下,在进行几次连续的距离测量后,利用较短时间间隔内的两次距离相对值做微分。
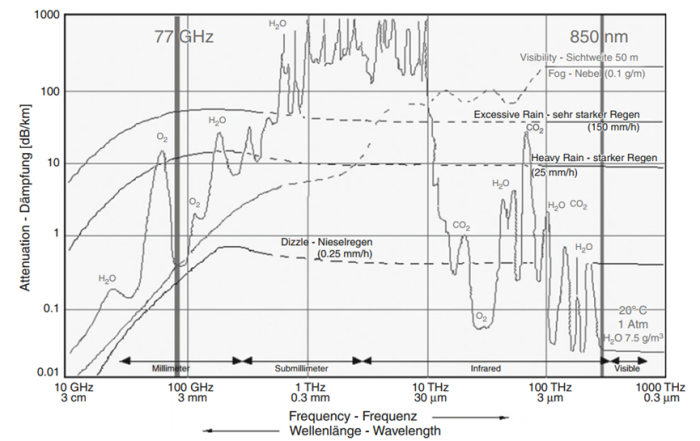
前提是距离信息是确定的,即相同的物体/反射点。取决于激光雷达的类型,距离信息R要么是纯粹的径向距离值,要么包含其他方向信息。扫描系统的水平角分辨率通常在0.5的范围内。忽略垂直信息,相对速度以及相对加速度分别为:
 ,
,
以上计算过程中必须保证识别距离的精确性,因为不精确的距离会导致加速度误差成倍的增加。因此,为了保证控制的精准性,需要对信号进行提前预测性滤波,比如使用卡尔曼滤波器。
3)多目标测量
如果在传感器的检测区域中有多个物体,则会在测量通道中有多个物体,并且如果障碍物之间的距离足够大,则可以通过适当的评估记录这些物体,这被称为激光雷达系统的多目标能力。除了对基本距离和方位测量外,激光雷达还可以通过反射光强灵敏度检测视觉状态目标(包括物体类型、形状等),但是由于物理和技术设计原理,其性能较摄像头识别差一些,但是激光雷达却拥有更高的分辨率和更宽的检测频率范围,而其检测的性能主要依赖于物体与环境的对比度。
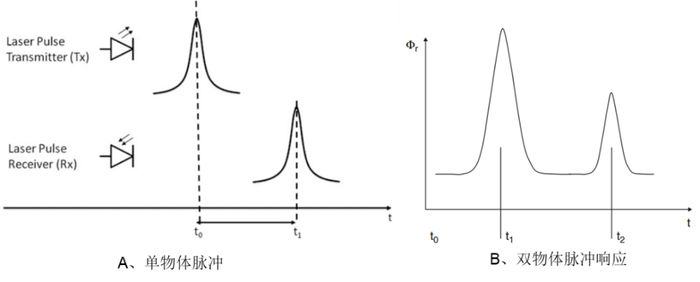
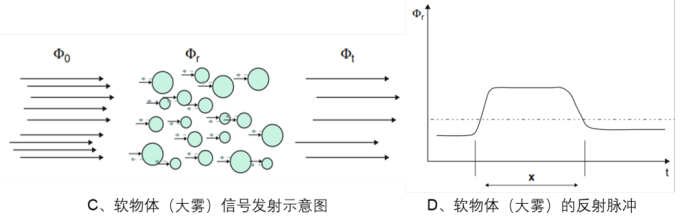
如果由于雾,雨等导致大气的衰减增加,则单个脉冲会反射到空气中的水滴上。根据系统的光学设计,这可能导致接收器出现饱和行为,则不再可能进行精确的目标测量。但是,较为先进的激光雷达传感器可以动态调整灵敏度,并结合测量通道的多目标能力,可以测量“软”大气干扰内部或之后的障碍物。使用“软”物体(例如雾),可以从不同距离记录许多信号。这导致单个脉冲响应的合并,并且总信号响应是平坦且扩展的回声(如下图)。因此,接收到的脉冲响应经过的时间(在最简单的情况下为单个高斯曲线)和回波的形状都可用于对检测到的回波的种类和环境条件进行更详细的分析。
如下图表示由于雾气或喷雾的信号形状包含有关大气干扰吸收程度的信息。从“信号距离” x的测量以及Φr(t)随时间的变化分析,可以估算出主要的可见性。
测距性能受到发射光脉冲强度和接收器灵敏度的显着影响。脉冲功率受激光发射眼安全要求的限制。但是,不影响其他参数,例如大气的透射率以及物体的大小或反射率。
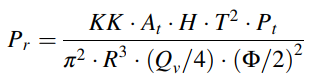
接收的光强度由以下方程式描述(仅当光束的尺寸小于物体的尺寸时才有效):
如果目标(距离较大)小于光束表面,则以下等式有效:
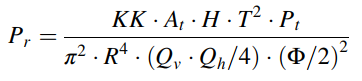
其中,Pr表示接收信号强度(W),KK表示测量物体的反射能力,Φ表示反射角(rad),H表示物体宽度(m),Ar表示目标大小(m2),T表示大气传播力,Qv表示垂直光束分辨力(rad),Qh表示水平光束分辨力(rad),At表示接收镜片面(m2),Pt表示激光能量(W)。
二
激光雷达传输与反射特性
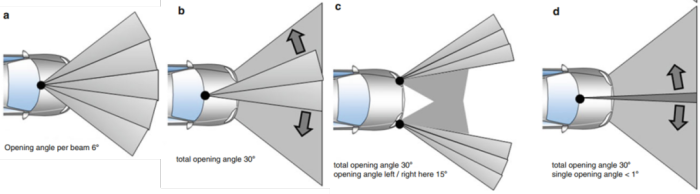
原则上,当今的LIDAR测距设备是根据相同的结构制造的。产生多个测量通道(光束)的方式以及“扫描”时光束偏转的实现方式(取决于是否跟踪曲线半径)和扫描方法存在差异。
其激光雷达相应通用的硬件及软件架构如下:
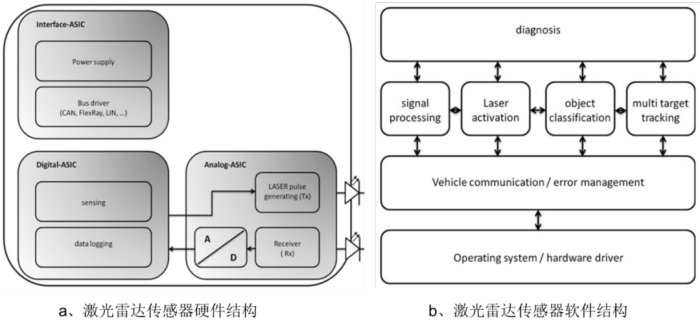
其中激光雷达硬件架构包括如下三个部分:
-
接口层Interface-ASIC的电源供电部分、总线驱动器; -
模拟层Analog-ASIC的激光雷达脉冲发生器(即激光雷达发射端Tx)、激光雷达接收器(Rx)以及数模转化器A/D单元; -
数字化层Digital-ASIC的感知计算模块、数据记录处理模块。
激光雷达的软件架构则包含如下四个部分:
-
诊断层Diagnosis:用于激光雷达内部基础的诊断服务功能,包括对其工作状态的自校验、关联系统互校验等; -
应用层Application:主要用于信号处理、激光扫描激活、对象分类、多目标检测等相关应用功能; -
车辆通信Communication/错误管理Error Management:即基本的车辆通信管理、信号误发漏发校验; -
操作系统Operation/硬件驱动Hardware driver:这是激光雷达最底层的操作系统及硬件驱动系统。
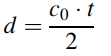
在信号传输过程中与所有主动和被动测量方法一样,大气的传输或衰减在系统设计和可实现的传感器系统性能中起着重要作用。大气的传输特性受其成分和物理条件的影响很大(见下图)。
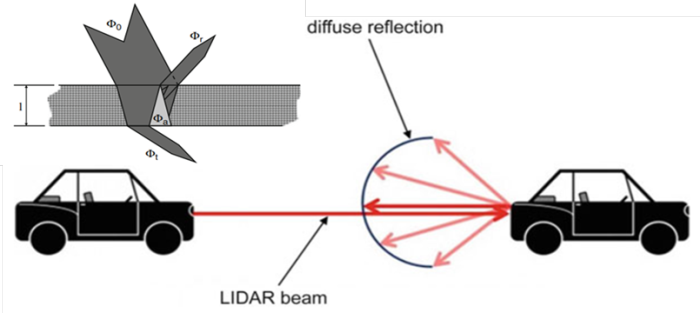
与摄像机原理不同,由于其采用被动方式从物体到传感器的距离需仅传输一次,而激光雷达在主动发送信号波的技术下,从物体到传感器的距离需传输两次。即在物体反射后,光必须再次以相同的方式沿相反方向返回。发射器发射光功率Φ0。在大气中(包含水滴,灰尘颗粒等),部分光被漫反射(Φr)。另外,总能量的一部分被吸收(转化为热量),直到在轨道的尽头只有减小的光焦度Φt。
三
自动驾驶中的布置及应用
通常,相对于位置集成到车辆中并不困难。基本上,激光雷达可以放在前面的任何位置。但是,优选的位置是在前灯之间的水平面中,以及在车顶的上边缘和保险杠之间的垂直位置。传感器是放置在挡风玻璃的外面还是后面都没关系。由于检测到污染,可以采取清洁措施,或者在必要时通知驾驶员。然而,与照相机相比,“仅”能量被转移,因此“清晰”的图像并不重要。这大大降低了清洁传感器表面的要求。根据考虑空气动力学要求的安装和集成情况,传感器上的深色杂质(例如昆虫)会对传感器性能产生最小的负面影响。
为了实现真正意义上的自动驾驶功能,需要考虑将车辆探测覆盖面尽可能多的覆盖全车身周围,这里需要考虑不同激光雷达类型的探测距离,可以覆盖到已有传感器(如前向毫米波雷达和摄像头的前向探测盲区及角雷达所存在的侧向探测盲区),同时从各种不同类型的激光雷达成本角度考虑,可以将相应的激光雷达选型及布置如下。
有两种种比较典型的激光雷达分别适用于不同的探测场合,混合式激光雷达MEMS将微机电系统与振镜结合形成MEMS振镜,通过振镜旋转完成激光扫描。全固态激光雷达目前主要包括光学相控阵(OPA)车载激光雷达和面阵闪光型(Flash)车载激光雷达。全固态车载激光雷达,完全取消了机械扫描结构,水平和垂直方向的激光扫描均通过电子方式实现;相比于仍保留有“微动”机械结构的MEMS激光来说,电子化更加彻底。
用于解决自动驾驶不同的探测目标场景需要选择不同激光雷达类型。
1)MEMS激光雷达
-
基本原理:其激光从移动的镜面反射,镜子向不同方向发送激光束以扫描特定区域,测量反射值,形成3D图像。具体来说,激光射向这块类似陀螺一样旋转的反光镜就行,反光镜通过转动,可以实现对激光方向的控制。 -
特性参数: DisRange=200m,FOV=63° x 20°,Resolution=0.09°x0.2°,RefreshRate=20fps。 -
适用场景:前向探测自动驾驶异常如下工况
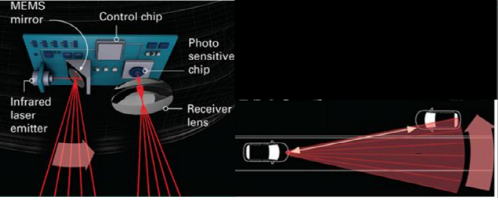
由于MEMS其长距离、高分辨率、低成本、易量产、车规级质量与稳定性特点,可以将该雷达用于前向探测以弥补当前传感器前向探测的不足。
2)Flash固态激光雷达
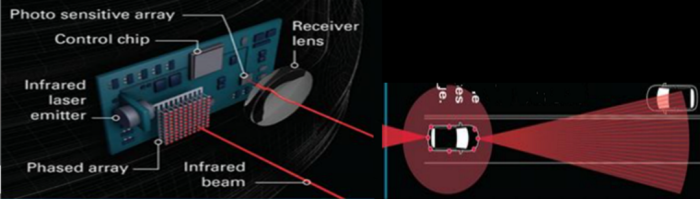
基本原理:以Flash激光雷达为例,其内部光线被发射出去,通过物体反射回来后,由照相机感光单元芯片进行读取,该芯片由网格组成可以将其反射的光线重构为3D图像。
特性参数:DisRange=50m,FOV=63° x 45°,RefreshRate=120fps;抗强光干扰、高可靠性及环境适应性、多机协同工作;
适用场景:近距离辅助探测。
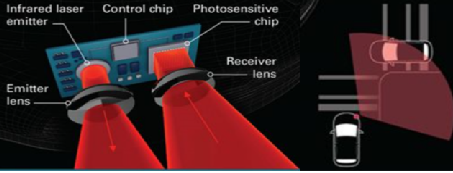
由于Flash雷达抗强光干扰、高可靠性及环境适应性、多机协同工作的特点,可以将该雷达用于辅助角雷达及测视摄像头对自车周边目标进行更为精准的探测;
3)Phased Array 固态激光雷达
基本原理:OPA激光雷达通过阵列图中的网格分别发射不同方向的激光束,光学相控阵一般都是通过电信号对其相位进行严格的控制实现光束指向扫描,当激光束被发出、返回接收且测量到时,其3D图像就形成了。
特征优势:扫描速度快、精度高、可控性好;
适用场景:由于其在允许的角度范围内可以做到任意指向,可以在感兴趣的目标区域进行高密度的扫描,在其他区域进行稀疏扫描,这对于自动驾驶环境感知非常有用,可以对驾驶过程中识别感兴趣的部分做到自适应。比如针对性的对自动驾驶轿车、行人、骑行者等做到高密度扫描检测,提升检出率,而对周边环境(如护栏、路沿等)降低扫描密度。
四
总结
作为用于自动驾驶车辆的几种研究车辆,例如Google汽车使用LIDAR作为基础传感器技术来扫描环境。基本输入是传感器的发射能量,因此是人眼视网膜上的能量平衡。要想真正的做到系统控制下的自动驾驶就必须更多让系统参与对于驾驶过程中危机干预能力,而非当前的L3系统下很多场景由驾驶员来进行接管控制,未来发展的趋势时在满足汽车(成本,性能,可靠性等)要求的LIDAR传感器的开发活动必然有所增加。












![]()
2001-2009 Vogel Industry Media版权所有 京ICP备12020067号-15 京公网安备110102001177号


获取更多评论