自动驾驶虚拟仿真技术(三):仿真测试场景数据格式
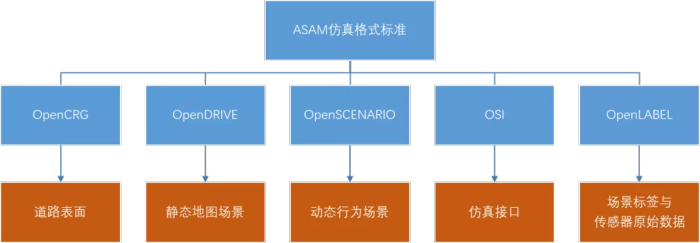
OpenDRIVE和OpenCRG主要定义了静态场景的数据格式;
OpenSCENARIO针对动态场景的数据格式;
OpenLABEL将对于原始数据和场景给出统一的标定方法;
OSI连接了自动驾驶功能与仿真工具,同时集成了多种传感器。
拓扑层:描述元素在路网中的位置和连接关系
逻辑层:描述元素在道路环境中的意义;
物理层:描述元素的属性(路面或障碍物);
可视化层:描述元素的几何形状和三维特征。
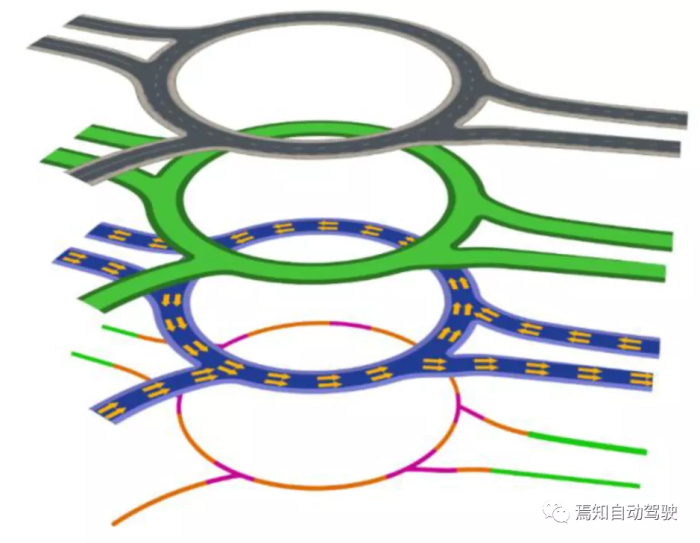
图 2 RoadXML的四个层次
点(Nodes):通过经纬度定义了一个地理坐标点,还可以标示物体海拔、所在的地图层面与所在建筑物内的层数等信息;
路(Ways):通过多个点连接城线来构成,可形成非闭合线(表示道路、河流、铁路等)、闭合线(表示环线地铁)、区域(表示封闭区域);
关系(Relations):由一系列的点(Nodes)和路(Ways)或其它的关系(Relations)来组成,相互的关系通过role来定义。
表 1 静态仿真场景要素
静态要素 |
属性 |
路网拓扑 |
道路数目、道路编号、交叉口 |
道路特征 |
起点/终点、车道数、车道宽、曲率半径、坡度 |
道路表面特质 |
材料、粗糙度、纹理、反射特性 |
车道线 |
线型、宽度、颜色 |
路面标识 |
交通标志、标线 |
交通灯牌 |
朝向、位置、信息、切换时间 |
街边建筑 |
物质、尺寸、表面属性 |
道路设施 |
护栏(高度、形状等)、硬路肩、隔离带 |
,特殊部分 |
慢车道、施工、匝道、桥梁、隧道 |
三、动态仿真场景数据格式
动态要素 |
属性 |
交通特性 |
密度、速度、人车分布 |
自车 |
几何模型、类型、运动参数、运动路线等 |
机动车 |
类型、交互动态、运动参数、几何模型 |
行人,动物 |
类型、交互动态、表面属性、动作姿势 |
环境场景数据主要包括天气类型,光照度能见度等数据,其中主要要素见下表3。
表 2 动态仿真场景要素
环境要素 |
属性 |
光照 |
强度、颜色、方位 |
雾/霾 |
能见度、范围、湿度、密度、反射衰减 |
雨雪 |
降水量、湿度、反射衰减 |
风 |
强度、方向 |
云 |
相对位置 |












![]()
2001-2009 Vogel Industry Media版权所有 京ICP备12020067号-15 京公网安备110102001177号


获取更多评论