基于四轮转向和直接横摆力矩控制的路径跟踪集成底盘控制算法设计
编者按:自动驾驶技术的研究主要包括感知层、决策规划层和控制层等方面,其中控制层的任务是根据决策规划层输出的参考轨迹,结合车辆自身状态,对车辆进行横纵向控制从而实现轨迹的跟随。近年来,底盘的电控系统功能日益丰富,控制策略日益成熟,为了获得更好的跟踪和操纵性能,对于车辆底盘集成控制的研究受到了广泛的关注。本文考虑将四轮转向和直接横摆力矩控制结合起来实现底盘的集成控制,在单车道、弯道和双车道等多个场景下,对比主动前轮转向、四轮转向和主动前转向+直接横摆力矩控制等三种控制策略,验证提出的控制策略的有效性和鲁棒性,为底盘集成控制策略的开发提供了参考。
本文重点介绍利用四轮转向和直接横摆力矩控制实现路径跟踪的底盘集成控制算法设计。设计的底盘集成控制算法主要由三部分组成:(1) 考虑参数不确定性、外部扰动、测量噪声和未建模的动力学特性,利用μ合成方法设计用于路径跟踪的鲁棒控制器;(2) 提出了控制分配算法,基于加权最小二乘法将输出扭矩需求分配给每个轮毂电机;(3) 考虑到车辆横向速度是路径跟踪控制的关键状态变量,由于使用低成本传感器不易测量,因此利用无迹卡尔曼滤波器设计了状态观测器,进行横向速度的估计。为了验证所设计的底盘集成控制算法的性能,在MATLAB/Simulink中进行了单车道变换、弯道变换和双车道变换等三种仿真工况,并在CarSim中构建了精度较高的整车模型。将提出的底盘集成控制算法与其他三种控制算法,即主动前转向、四轮转向和主动前转向+直接横摆力矩控制进行比较,仿真结果表明底盘集成控制算法具有更好的路径跟踪性能和操控稳定性。同时,在车速变化和不同路况下也验证了底盘集成控制算法的鲁棒性能。
1 引言
近年来,随着拥堵、事故等各种交通问题的增多,自动驾驶技术成为智能交通系统(ITS)解决上述问题的新兴研究热点。路径跟踪是自主地面车辆(AGV)的基本能力和主要任务,因此为了使车辆自动跟踪目标路径,需要设计路径跟踪控制器,以实现包括横向位移和横摆角误差等的跟踪误差最小。
近年来,许多研究人员对AGV的路径跟踪控制问题进行了研究。许多控制算法和策略应用于该领域,例如模糊控制[2]、最优控制[3,4]、滑模控制(SMC)[5,6]、鲁棒控制[7]、模型预测控制(MPC)[8,9]自适应神经控制[10]、遗传算法[11]和输出约束控制[12]。然而,大多数控制技术是针对具有前轮转向 (FWS) 的传统内燃机驱动车辆 (ICV),而本文提出的四轮转向 (4WS) 车辆比FWS车辆具有更好的机动性、操纵稳定性和路径跟踪能力[13],因此它们更适合用作 AGV。由于4WS车辆的路径跟踪问题比FWS车辆更复杂,因此4WS车辆的路径跟踪控制策略的研究仍然相对有限[14]。Mashadi等人[15]将线性二次调节器 (LQR) 技术应用于4WS 车辆的路径跟踪控制器设计并得出结论,4WS 车辆显示出AGV车辆的路径跟踪控制潜力。上述设计的 LQR 控制器虽然具有良好的路径跟踪能力,但仅适用于没有参数扰动和外部扰动的名义模型[1]。显然,参数扰动和外部扰动的存在会增加AGV路径跟踪控制的难度。为了解决扰动模型的路径跟踪控制器设计问题,提出了一种基于SMC理论的4WS车辆自动路径跟踪控制器[14],具有比FWS路径跟踪控制器更精确的路径跟踪能力,并且具有 抗系统不确定性的鲁棒能力。Yakub及其同事[16,17]研究了带有前馈控制器的MPC方法实现4WS的AGV的路径跟踪控制,并证明MPC能够保持车辆稳定性,并具有消除侧风效应的能力。文献[18]设计了一种用于AGV的集成4WS鲁棒控制器,在存在参数不确定性的情况下,能够使车辆跟踪所需的路径。
在各种研究中,直接横摆力矩控制 (DYC) 是提高车辆操纵稳定性的有效方法[19-22],特别是对于带有四个轮毂电机的四轮独立驱动 (4WID) 电动汽车 (EV) ,每个轮毂电机的驱动和制动转矩都可以独立控制,可以充分提高DYC的控制性能。为了充分提高动态性能,本文将4WS和DYC都用于AGV的路径跟踪控制器设计。
与其他控制算法相比,鲁棒控制可以更有效地处理参数扰动和外部扰动。通常,鲁棒控制理论的主要有力工具是 优化方法和
优化方法和 合成方法。这两种方法都基于简化的线性模型,尽管线性模型与实际系统模型相比并不准确[23]。
合成方法。这两种方法都基于简化的线性模型,尽管线性模型与实际系统模型相比并不准确[23]。 优化方法可以实现鲁棒稳定性和名义性能要求,一些鲁棒性能要求也可以满足[24],然而,这种方法相对保守,因为该理论无法仔细区分系统扰动[25]。相比之下,
优化方法可以实现鲁棒稳定性和名义性能要求,一些鲁棒性能要求也可以满足[24],然而,这种方法相对保守,因为该理论无法仔细区分系统扰动[25]。相比之下, 合成方法基于结构化奇异值理论,可以实现鲁棒稳定性[26,27]。为此,本文使用
合成方法基于结构化奇异值理论,可以实现鲁棒稳定性[26,27]。为此,本文使用 合成方法来设计路径跟踪控制器。
合成方法来设计路径跟踪控制器。
本文使用4WS和DYC技术处理基于底盘集成控制算法的路径跟踪问题。底盘集成控制算法主要包括用于路径跟踪的 合成鲁棒控制器、用于DYC的控制分配算法和用于横向速度估计的无迹卡尔曼滤波器(UKF)。本文的结构如下。四轮独立转向 (4WIS) 和4WID EV在“4WIS和4WID EV”部分中被用做路径跟踪研究的AGV。车辆动力学和路径跟踪的建模在“路径跟踪的建模和问题描述”部分进行了描述。“集成底盘控制算法”部分涉及4WIS 和4WID EV的控制技术。集成底盘控制算法的性能在“仿真结果”部分进行评估,该部分基于通过CarSim–Simulink平台对精确的整车模型进行仿真分析。最后,对工作进行总结和展望。
合成鲁棒控制器、用于DYC的控制分配算法和用于横向速度估计的无迹卡尔曼滤波器(UKF)。本文的结构如下。四轮独立转向 (4WIS) 和4WID EV在“4WIS和4WID EV”部分中被用做路径跟踪研究的AGV。车辆动力学和路径跟踪的建模在“路径跟踪的建模和问题描述”部分进行了描述。“集成底盘控制算法”部分涉及4WIS 和4WID EV的控制技术。集成底盘控制算法的性能在“仿真结果”部分进行评估,该部分基于通过CarSim–Simulink平台对精确的整车模型进行仿真分析。最后,对工作进行总结和展望。
对于大多数传统的ICV,仅通过转动前轮就可以实现对两种车辆状态(横向速度和横摆角速度)的动态控制,但这无法使车辆在高速下获得更好的动态性能。然后,4WS的概念在80年代后期被提出[14]。在低速时,4WS技术可以通过前后轮的反相转向来减小转弯半径从而提高机动性。在高速时,4WS技术可实现零侧滑角和所需横摆角速度,通过前后轮同相转向来提高操纵稳定性。4WIS和4WID EV是一种具有四个转向电机和四个驱动电机的特种车辆,即每个车轮的转向角和驱动扭矩可以独立控制。因此,4WIS 和 4WID EV的控制自由度 (DoF) 远大于传统FWS ICV。相应的,4WIS和4WID EV的路径跟踪问题更加复杂。不过值得一提的是,4WIS和4WID EV可以通过4WS和DYC技术实现更好的动态性能。
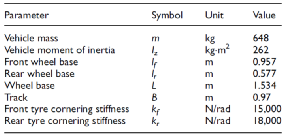
近年来,许多学者对4WIS和 4WID EV 的车辆配置和控制策略进行了大量研究[28-31]。Hang等人[32]指出转向系统、驱动系统、制动系统和悬架系统的一体化设计可以推动4WIS和4WID EV的发展,成为未来智能汽车平台。本文使用的4WIS和4WID EV仿真模型来自 Hang 等人[33],原型车和结构参数分别如图1和表1所示。
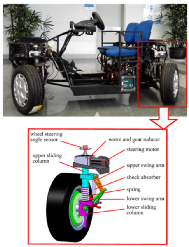
图1 4WIS和4WID EV原型
表1 4WIS和4WID EV结构参数
车辆模型
2-DoF 车辆模型。为了最小化控制器设计的车辆模型的复杂性,假设纵向速度不变,只考虑横向和横摆运动,那么4WIS和 4WID EV 被简化为图2所示水平面上的2-DoF车辆模型。此外,假设两个前轮和两个后轮分别在前轴和后轴的中心集中在一起。然后,将四轮汽车模型简化为单轨模型,如图3所示。两个模型中的转向角关系应满足 Ackerman 转向几何,可导出如下
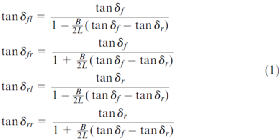
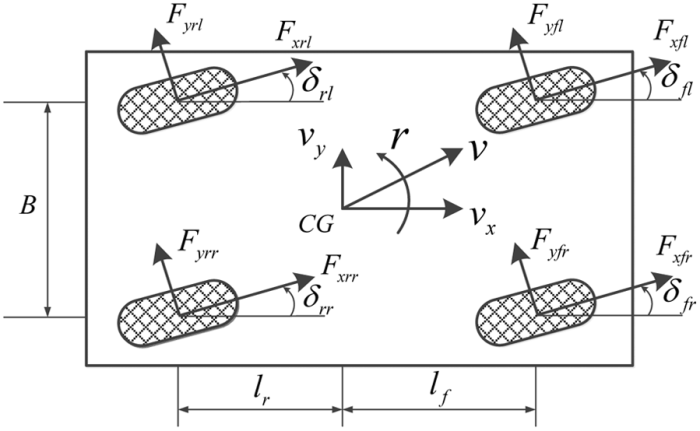
图2 2-DoF 车辆模型
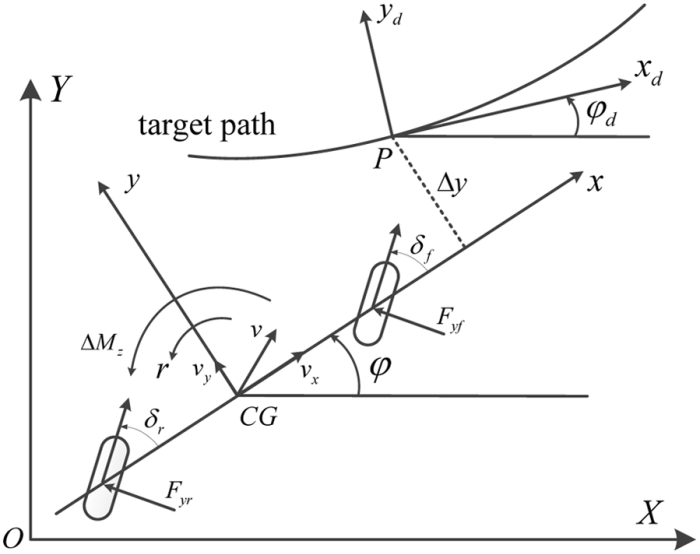
图3 用于路径跟踪的单轨模型
其中, 代表了每个车轮的转向角。
代表了每个车轮的转向角。
如图3所示,单轨模型具有三个输入:前转向角 、后转向角
、后转向角 和由纵向轮胎力产生的外部横摆力矩
和由纵向轮胎力产生的外部横摆力矩 。车辆横向速度
。车辆横向速度 和横摆速度
和横摆速度 被设置为状态变量。则单轨模型的非线性动力方程可表示为
被设置为状态变量。则单轨模型的非线性动力方程可表示为

 和
和 分别是前后轮侧向轮胎力。
分别是前后轮侧向轮胎力。
Dugoff轮胎模型。精确地用数学表达式来描述轮胎与路面的接触力是相当复杂的。最常见的轮胎模型包括魔术公式[34]、Dugoff 轮胎模型[35]、统一轮胎模型[36]、Fiala轮胎模型[37]和 HSRI轮胎模型[38]。与其他模型相比,Dugoff轮胎模型能够以较少的未知参数相对准确地描述轮胎与路面的接触力。为此,本文选用它,轮胎侧向力可写为

 和
和 分别代表前后轮的轮胎侧偏角,可以表示为
分别代表前后轮的轮胎侧偏角,可以表示为
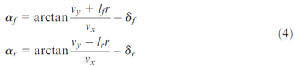
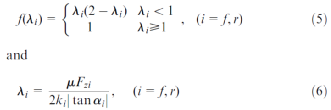
 代表轮胎和路面之间的摩擦系数,
代表轮胎和路面之间的摩擦系数, 代表每个车轮的垂直载荷。
代表每个车轮的垂直载荷。
从上述方程可以看出,轮胎侧向力是一个相对于轮胎侧偏角的非线性函数,主要用于设计用于侧向速度估计的UKF。为了简化侧向动态控制器的设计,在轮胎侧偏角较小的情况下,横向轮胎力与轮胎侧偏角的关系可以表示为线性关系。因此,方程(3)可以简化为线性轮胎模型:

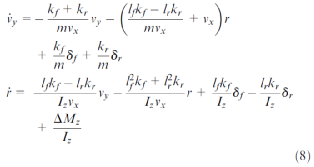
线性车辆模型。将式(4)和(7)代入式(2),单轨模型的线性动力方程可推导出为
路径跟踪
4WIS 和 4WID EV 的路径跟踪模型基于单轨模型在图3中描述,三种坐标系如图3所示,xy坐标系表示车辆在其实际路径上的方向,xdyd坐标系表示车辆在其目标路径上的方向,XY坐标系为大地坐标系。为了实现期望的路径跟踪控制,本文将路径跟踪问题定义为使横摆角误差和横向位置误差最小。
横摆角误差表示为实际横摆角 与目标横摆角
与目标横摆角 之间的差值。
之间的差值。


其中 为目标路径的曲率半径,vx为实际车辆纵向速度,图3中的目标点P随车辆移动。
为目标路径的曲率半径,vx为实际车辆纵向速度,图3中的目标点P随车辆移动。
横向位置误差 定义为目标路径点P到x轴的垂直距离,其导数可导出为
定义为目标路径点P到x轴的垂直距离,其导数可导出为

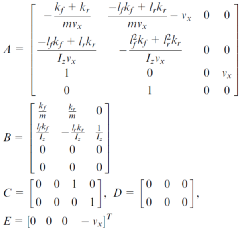
结合方程 (8)、(9) 和 (10) 得出路径跟踪问题的状态空间方程:

其中状态向量 ,控制输入向量
,控制输入向量 ,外部输入向量
,外部输入向量 ,系数矩阵A、B、C、D和E由下式给出
,系数矩阵A、B、C、D和E由下式给出
总体控制框架
用于路径跟踪的4WIS和4WID EV的集成底盘控制框架如图4所示。所提出的底盘集成控制算法主要由三部分组成:(1)纵向运动控制,(2)横向和横摆运动控制和(3)车辆状态估计。
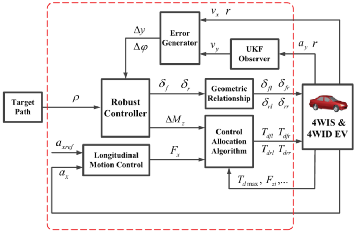
图4 用于路径跟踪的4WIS和4WID EV的底盘集成控制框架
纵向运动控制旨在通过轮毂电机产生的纵向力使车辆达到理想的纵向运动响应。所需的纵向力由驾驶员控制的加速踏板位置直接计算。由于纵向运动控制不是路径跟踪控制的重点,本文主要讨论4WIS和4WID EV的横向和横摆运动控制。图4中,Fx为总纵向力,Tdi(i=fl,fr,rl,rr)为各轮毂电机的扭矩,Tdmax为轮毂电机的最大输出扭矩,ax和axref分别是车辆的实际纵向加速度和参考纵向加速度。
横向和横摆运动控制由4WS和DYC实现。前后转向角信号和外部横摆力矩信号由所提出的鲁棒控制器计算。然后,使用单轨模型的前后转向角信号,基于阿克曼转向几何计算出每个车轮的转向角。根据DYC的外部横摆力矩信号和纵向运动控制的期望纵向力,基于控制分配算法计算每个车轮的驱动扭矩。
车辆横向速度是路径跟踪控制的关键状态变量。然而,用低成本传感器获得准确的横向速度信号并不容易。因此,状态观察器被设计用于利用 UKF 进行路径跟踪控制。
鲁棒控制器设计
为了减少系统参数不确定性、外部干扰、测量噪声、未建模动态特性等对4WIS和4WID EV路径跟踪性能的影响,利用 合成方法设计了鲁棒控制器。
合成方法设计了鲁棒控制器。
具有不确定参数的扰动系统模型。对于控制器设计,假设车辆纵向速度vx是恒定的,以在“线性车辆模型”部分建立线性单轨模型。然而,车辆在实际中无法保持恒定速度,因此方程(8)中的vx参数不确定性是不可避免的。此外,众所周知,车辆的动态性能对道路条件(即结冰路面、潮湿路面和干燥路面)的影响非常敏感,这通过摩擦系数的变化来体现。摩擦系数变化的影响可以表示为方程(8)中轮胎侧偏刚度kf 和kr的参数不确定性。通常,可以假设vx、kf和kr的实际值在某个已知区间内,可以表示为

其中 是所谓的vx、kf和kr的标称值;dvx、dkf 和dkr表示相对于三个标称值的最大扰动百分比;
是所谓的vx、kf和kr的标称值;dvx、dkf 和dkr表示相对于三个标称值的最大扰动百分比; 是未知扰动,满足
是未知扰动,满足

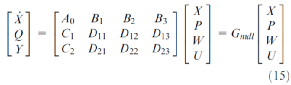
基于线性分数变换(LFT),用不确定参数代替方程(12)的扰动路径跟踪模型,描述如下
扰动系统模型框图如图5所示。扰动系统模型G由Gmdl和不确定块 利用上层 LFT 组合得到,定义为
利用上层 LFT 组合得到,定义为

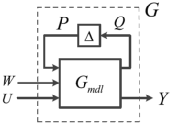
图5 扰动系统模型框图
不确定块 反映了vx、kf和kr的参数不确定性,它是一个对角矩阵,可以表示为
反映了vx、kf和kr的参数不确定性,它是一个对角矩阵,可以表示为

此外,它是范数有界的

在等式(15)和图5中,Q和P分别代表 的输入和输出,它们也是Gmdl的输出和输入。
的输入和输出,它们也是Gmdl的输出和输入。
因此,扰动系统模型G的输入输出关系为

闭环控制系统。用于路径跟踪的闭环控制系统框图如图 6 所示,其中包括扰动系统模型G、反馈控制器K以及与不确定模型和性能目标相关的其他元素。除了前面提到的不确定块 ,还提出了不确定块
,还提出了不确定块 ,以输入乘法扰动的形式描述闭环控制系统的非结构化不确定性。在图 6 中,U表示控制器K的输出,它由前后转向角和外部横摆力矩组成。YC是控制器K的输入,它是系统输出Y和传感器测量噪声n的总和。W和d分别代表路径信息和外部干扰。输出eU和eY用于评估闭环系统的稳健性能。
,以输入乘法扰动的形式描述闭环控制系统的非结构化不确定性。在图 6 中,U表示控制器K的输出,它由前后转向角和外部横摆力矩组成。YC是控制器K的输入,它是系统输出Y和传感器测量噪声n的总和。W和d分别代表路径信息和外部干扰。输出eU和eY用于评估闭环系统的稳健性能。
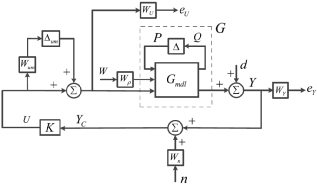
图6 用于路径跟踪的闭环控制系统框图
此外,加权函数WU和WY分别代表U和Y的性能输出。Wn用于描述不同频域对测量噪声n的影响。Wρ用于衡量来自道路的干扰。Wum表示相应传递函数块的不确定性频率响应。
为了获得良好的路径跟踪性能和瞬态响应,选择合适的加权函数WY,其由下式给出

权重函数WU是根据执行器的能力约束选择的。前后转向角限制在45°以内,最大外横摆力矩设定为1000N·m。因此,WU定义为

考虑到噪声的高通特性,噪声整形函数Wn表示为

Wρ提出将目标路径的最小曲率半径定义为 100 m,表示为

Wum的大小可以解释为模型不确定性的百分比,它们被定义为

这意味着非结构化模型误差在低频时可能约为4%,在高频时可能高达100%。
 合成和 D-K 迭代。对于
合成和 D-K 迭代。对于 合成,应用于图6中的闭环控制系统,建立路径跟踪的开环控制系统。如图7所示,Ps表示由标称模型和加权函数组成的22输入21输出开环系统的传递函数矩阵。w和z分别表示所有不确定块的输出和输入。
合成,应用于图6中的闭环控制系统,建立路径跟踪的开环控制系统。如图7所示,Ps表示由标称模型和加权函数组成的22输入21输出开环系统的传递函数矩阵。w和z分别表示所有不确定块的输出和输入。
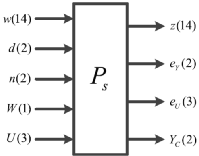
图7 用于路径跟踪的开环控制系统框图
在开环控制系统的基础上,重新安排闭环控制系统结构,得到如图 8 所示的广义系统。所有参数化和非结构化的不确定性都从标称系统中分离出来,放在块  中,表示为
中,表示为

块 是稳定和范数有界的
是稳定和范数有界的

在图8中, 是由d、n和W组成的系统输入,
是由d、n和W组成的系统输入, 是由eY和eU组成的系统输出。因此,广义系统可以表示为
是由eY和eU组成的系统输出。因此,广义系统可以表示为
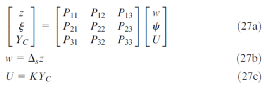
为了方便推导,Ps被划分为等式(27a)。通过较低的LFT组合Ps和K产生矩阵M,其写为
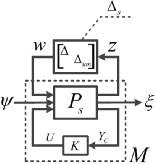
图8 广义系统框图
之后, 广义系统被简化为标准M- 配置,如图 9 所示。输入输出关系描述为
配置,如图 9 所示。输入输出关系描述为

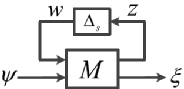
图9 标准M- 配置的框图
配置的框图
将方程 (27b) 代入方程 (29) 得到以下方程

因此,关于扰动 的闭环系统的鲁棒性能定义为
的闭环系统的鲁棒性能定义为

此外,方程(31)等价于图10中描述的系统回路,对于虚构的不确定块 即非结构化,通常称为性能不确定块是鲁棒稳定的。
即非结构化,通常称为性能不确定块是鲁棒稳定的。 也是范数有界的
也是范数有界的

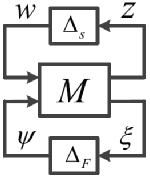
图10 带有 分析的标准M-
分析的标准M- 配置的框图
配置的框图
因此,鲁棒性能设计以及针对 的鲁棒稳定可以等效地视为具有不确定块
的鲁棒稳定可以等效地视为具有不确定块  的鲁棒稳定问题,即
的鲁棒稳定问题,即

综上所述,得出以下结论:
1.对于不确定块 ,实现闭环系统的鲁棒稳定性等价于
,实现闭环系统的鲁棒稳定性等价于 。
。
2.对于不确定块 ,实现闭环系统的鲁棒性能等价于
,实现闭环系统的鲁棒性能等价于 ,其中下标
,其中下标 表示结构奇异值。
表示结构奇异值。
3.实现闭环系统的标称性能相当于 。
。
根据以上结论,为了达到鲁棒性能要求,需要找出一个稳定的控制器K,使得对于每个频率 ,结构奇异值满足以下要求
,结构奇异值满足以下要求

基于 合成设计,旨在解决问题
合成设计,旨在解决问题

针对上述问题,采用D-K迭代法。由于

其中 是任何
是任何 遵循
遵循 的矩阵集合。
的矩阵集合。
最后,优化问题可以表示为

在使用HankelNorm近似的控制器降阶后,最终的鲁棒控制器被计算出来并显示在附录1中。
控制分配算法
由于4WIS和4WID EV是典型的过驱动系统,因此提出控制分配算法将广义力分配给执行器作为控制输入,即本文中每个轮毂电机的扭矩。
考虑到高速时每个车轮的转向角很小,忽略转向角对纵向力和外部横摆力矩的影响。从图 2 中,总纵向力、外横摆力矩和各轮胎纵向力的关系可以表示为

假设各轮胎工作在稳态,忽略滚动阻力,各轮胎纵向力可简化为

其中Tdi是每个轮毂电机的扭矩,Rw是轮胎滚动半径。
将等式(39)代入(38)产生以下等式

其中 ,
, 和Bx是有效性矩阵,其推导为
和Bx是有效性矩阵,其推导为

加权最小二乘法(WLS)是解决控制分配问题的有效方法。与其他控制分配算法相比,它算法简单实用,具有计算速度快,准确度高的优点。WLS分配方法是从序列最小二乘法(SLS)分配方法衍生而来,SLS分配方法由下式给出:

其中Uxd是目标控制值,WUx是执行器的权重矩阵,WV是广义力的权重矩阵, 和
和 分别是控制向量Ux的下限和上限。
分别是控制向量Ux的下限和上限。
SLS分配方法的第一步是求出控制向量集以使可行域内的加权分配误差 最小。然后,选择最接近目标控制值Uxd的期望控制向量Ux。
最小。然后,选择最接近目标控制值Uxd的期望控制向量Ux。
而后两步可以通过WLS分配方法将权重参数 合并为一个步长,可以定义为
合并为一个步长,可以定义为
与SLS分配方法相比,这种方法的计算时间可以大大减少,并且 通常设置得非常大,以尽量减少分配误差。
通常设置得非常大,以尽量减少分配误差。
此外,方程(43)中的目标函数可以简化为
最后,使用 WLS 分配方法的控制分配问题表示为

如等式(45)所述,控制分配问题应在约束范围内解决。执行器的约束包括执行器的能力约束和道路条件的约束,表示为

其中Tdmin和Tdmax分别为轮毂电机的最小和最大输出扭矩。轮毂电机的输出扭矩与工作转速有关,根据轮毂电机的测试结果,其关系如图11所示。从图中可以看出,电机在低于基速的转速下工作在恒转矩区。当电机转速高于基速时,输出转矩随着转速的增加而减小。因此,电机工作在恒功率区域。
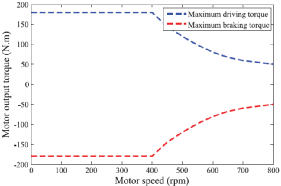
图11 轮毂电机的最大输出扭矩
考虑到每个轮毂电机的工作输出扭矩与相应轮胎的垂直载荷成正比,执行器的权重矩阵WUx定义为

权重矩阵的广义力WV用于调整总纵向力和外横摆力矩的优先级,即可以增加外横摆力矩的权重,以提高车辆在较大横向加速度情况下行驶时的操纵稳定性。由于采用4WS技术来提高车辆的动态性能,总纵向力和外部横摆力矩的权重设置为相同的值

UKF观测器
考虑到车辆横向速度的测量需要复杂的设备,成本高,在工程应用中不切实际,车辆横向速度信号主要由观测器获得,如Luenberger观测器[39]、滑模观测器[40]、非线性观测器[41]和卡尔曼滤波(KF) 观测器[42]。KF是工业中使用最广泛的观测技术之一,尤其是应用在车辆中。扩展卡尔曼滤波器(EKF)和UKF是两种主要的非线性KF,适用于非线性系统的状态观测。与EKF相比,UKF没有系统强非线性时由雅可比矩阵得到的线性模型引起的发散问题。它采用的策略是优先对给定非线性系统函数的概率分布进行建模而不是函数本身,因此 UKF 中忽略了线性化过程[43]。为此,本文利用非线性单轨模型,采用 UKF 作为状态观察器。
UKF状态观测器设计的非线性状态空间方程可以表示为

其中状态向量 ,控制输入向量
,控制输入向量 和观测向量
和观测向量 ,由横向加速度和横摆角速度组成。此外,过程和测量噪声向量由 wU(t)和vU(t)表示,应该是高斯白噪声。非线性状态函数
,由横向加速度和横摆角速度组成。此外,过程和测量噪声向量由 wU(t)和vU(t)表示,应该是高斯白噪声。非线性状态函数 和观测函数
和观测函数  可以写成
可以写成
对于UKF状态观测器设计,方程(49)应以离散形式表示。利用欧拉近似方法,可推导出

其中 ,
,  是采样时间。
是采样时间。
UKF状态观测器设计的第一步是设置合适的初始估计 和初始误差协方差PU(0)。考虑到状态变量xU 服从均值为
和初始误差协方差PU(0)。考虑到状态变量xU 服从均值为 和协方差
和协方差 的正态分布,
的正态分布, 和加权因子Wi定义为
和加权因子Wi定义为
其中n是状态向量的维度,k是任意常数,ui是来自下列矩阵 的行向量
的行向量

基于状态变量的随机特性,可以使用来自上一步的 和加权因子Wi计算状态
和加权因子Wi计算状态 及其误差协方差
及其误差协方差 的预测值:
的预测值:
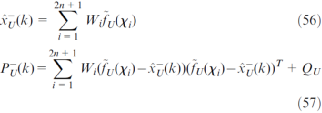
其中QU是过程噪声wU(t)的协方差矩阵。
根据输出向量的预测随机性,观测量 及其协方差
及其协方差 的预测值可以表示为
的预测值可以表示为
其中RU是测量噪声vU(t)的协方差矩阵。
最后,卡尔曼增益KU(k)的计算、状态 及其误差协方差
及其误差协方差 的估计是基于上一步的参数获得的:
的估计是基于上一步的参数获得的:
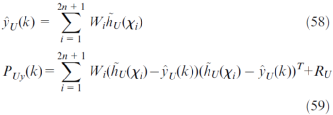
为了研究用于路径跟踪的底盘集成控制算法的性能,使用CarSim中内置的整车模型在MATLAB/Simulink中进行了三个仿真操作。在单车道变换机动中,对设计的鲁棒控制器、控制分配算法和UKF观测器的性能进行了评估。此外,设计的路径跟踪算法与其他三种算法进行了比较。在双车道变换机动中,测试了所设计的用于路径跟踪的底盘集成控制算法的鲁棒性能。仿真中使用的车辆参数列于表1中。此外,还列出了控制器观测器设计的一些参数。名义值 、
、 和
和  分别设置为 20 m/s、15,000 N/rad和18000 N/rad。最大扰动百分比dvx 、dkf和 dkr分别定义为50%、35%和 35%。过程噪声的协方差矩阵选择为QU=diag(0.02, 0.02),测量噪声的协方差矩阵选择为RU= diag(4, 1),仿真框图如图12所示。仿真前,在CarSim车辆模型中设置实车参数。为了在CarSim中实现4WIS和4WID,更换了原有的驱动系统和转向系统。四轮转向角和四个驱动扭矩直接施加到四个车轮上,这是MATLAB和CarSim联合仿真的关键步骤。
分别设置为 20 m/s、15,000 N/rad和18000 N/rad。最大扰动百分比dvx 、dkf和 dkr分别定义为50%、35%和 35%。过程噪声的协方差矩阵选择为QU=diag(0.02, 0.02),测量噪声的协方差矩阵选择为RU= diag(4, 1),仿真框图如图12所示。仿真前,在CarSim车辆模型中设置实车参数。为了在CarSim中实现4WIS和4WID,更换了原有的驱动系统和转向系统。四轮转向角和四个驱动扭矩直接施加到四个车轮上,这是MATLAB和CarSim联合仿真的关键步骤。
图12 仿真模块图
单车道变换
在这种情况下,基于设计的底盘集成控制算法,对4WIS和4WID EV进行路径跟踪的单车道变换行为。在仿真模型中,纵向速度和道路摩擦系数分别设置为 20 m/s和0.85。
仿真结果如图13所示。每个车轮的转向角如图13(a)所示,从中我们可以观察到,由于转向角很小,两个前轮转向角彼此非常接近。对于两个后轮转向角,可以得出相同的结论。图 13(b) 显示了基于控制分配算法的每个轮毂电机的输出扭矩。可以看出,在换道前,前后左右轮毂电机产生相同的输出扭矩,而在换道过程中,平衡被打破,存在扭矩差,目的是使左右轮毂电机之间产生外部横摆力矩,从而提高路径跟踪性能。使用UKF和EKF对横向速度和横摆角速度的估计结果如图13(c)和(d)所示,从中可以看出UKF和EKF的估计误差都非常小。然而,从图13(e)和(f)可以发现,UKF的估计误差小于EKF,表明设计的UKF观测器具有更好的观测能力。EKF的设计过程见Hang et al.[32]。
基于4WS+DYC设计的控制算法与其他三种控制算法,即主动前转向(AFS)、4WS和AFS+DYC的路径跟踪对比结果如图14所示。图14(a)-(c)说明了前后转向角和外部横摆力矩的变化,可以观察到使用DYC技术的转向角大于其他控制算法的转向角,这是由于图14(c)所示的外部横摆力矩导致的转向能力改进的结果。四个控制器的横向速度如图14(d)所示。相比之下,使用4WS+DYC的控制器横向速度最小,操控稳定性最好。对于图14(e)中显示的横摆角速度几乎没有区别。四种控制算法的路径跟踪结果包括横向位置误差、横摆角误差和实际跟踪路径如图14(f)-(h)所示。可以发现,由于4WS和DYC技术的综合应用,使用4WS+DYC的横向位置和横摆角的路径跟踪误差比使用其他控制算法的要小得多,这表明4WS+DYC的路径-跟踪性能优于其他控制算法。此外,可以看出传统的AFS控制算法的路径跟踪误差最大。4WS的路径跟踪性能优于AFS+DYC,这要归功于4WS系统中后轮的转向能力,有效降低了车辆的侧偏角,进而降低了路径跟踪误差。综上所述,4WS+DYC兼具4WS和DYC的优点,相比其他三种控制算法,可以使车辆获得更优越的路径跟踪性能和操纵稳定性。换言之,当 4WS和DYC中的一个不能有效工作时,另一种控制算法可以工作以防止车辆偏离其目标路径甚至失去控制。
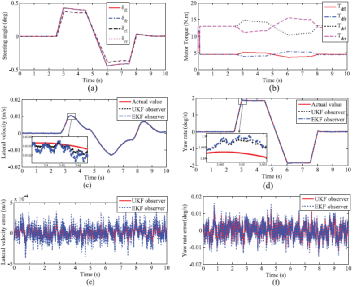
图13 使用底盘集成控制算法的单车道变换仿真结果

图14 不同控制器下单车道变换仿真结果
曲线行驶
在曲线机动中,将设计的 合成控制器的路径跟踪性能与
合成控制器的路径跟踪性能与 控制器的路径跟踪性能进行比较。
控制器的路径跟踪性能进行比较。 控制器的设计过程是作者之前的工作,在Hang et al.[44]所示。在该仿真条件下,纵向速度和道路摩擦系数分别设置为20m/s和0.28,仿真时间设置为10s。目标路径分为三部分,在前3秒内,目标路径的曲率为零。3~7s,目标路径的曲率保持恒定值0.0067,即曲线半径为150m。然后,目标路径的曲率归零。仿真结果如图15所示。从图 15(a) 中可以看出,由于
控制器的设计过程是作者之前的工作,在Hang et al.[44]所示。在该仿真条件下,纵向速度和道路摩擦系数分别设置为20m/s和0.28,仿真时间设置为10s。目标路径分为三部分,在前3秒内,目标路径的曲率为零。3~7s,目标路径的曲率保持恒定值0.0067,即曲线半径为150m。然后,目标路径的曲率归零。仿真结果如图15所示。从图 15(a) 中可以看出,由于 优化方法相对保守,因此
优化方法相对保守,因此 合成控制器与
合成控制器与 控制器相比具有更好的路径跟踪性能。此外,图15(b)和(c)显示了路径跟踪过程中两个控制器的横向位置误差和横摆角误差。不难发现
控制器相比具有更好的路径跟踪性能。此外,图15(b)和(c)显示了路径跟踪过程中两个控制器的横向位置误差和横摆角误差。不难发现 合成控制器具有较小的横向位置和横摆角的跟踪误差。为了充分评估两个控制器的性能,车辆的初始位置与目标路径有0.1m的横向偏移。仿真结果表明,两种控制器均具有较强的抗模型不确定性鲁棒稳定性。横向速度的仿真结果如图15(d)所示,从中可以看出
合成控制器具有较小的横向位置和横摆角的跟踪误差。为了充分评估两个控制器的性能,车辆的初始位置与目标路径有0.1m的横向偏移。仿真结果表明,两种控制器均具有较强的抗模型不确定性鲁棒稳定性。横向速度的仿真结果如图15(d)所示,从中可以看出 合成控制器可以使车辆获得更好的操纵稳定性。
合成控制器可以使车辆获得更好的操纵稳定性。
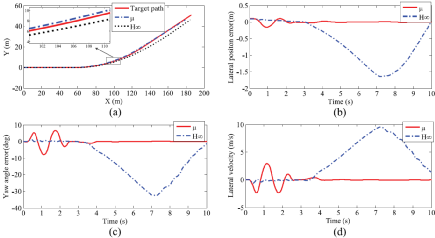
图15 曲线行驶的仿真结果
双车道变换
双车道变换旨在评估使用4WS+DYC的路径跟踪控制算法的鲁棒性能。随着纵向速度的变化,模拟了三种不同的路况。路面摩擦系数分别设置为0.28、0.5和0.85。值得一提的是, =0.28,纵向速度如图16(a)所示,是一种相对极限的工况,传统的AFS控制器无法保持稳定,车辆失控。前后转向角和外部横摆力矩分别如图16(b)-(d)所示。可以发现,路径跟踪控制算法在地附着道路(
=0.28,纵向速度如图16(a)所示,是一种相对极限的工况,传统的AFS控制器无法保持稳定,车辆失控。前后转向角和外部横摆力矩分别如图16(b)-(d)所示。可以发现,路径跟踪控制算法在地附着道路( =0.28)有较大的输出值,以保证车辆的操纵稳定性。此外,我们从图16(e)中可以看出,车辆的横向速度随着道路摩擦系数的增加而降低,因为四个车轮的横向轮胎力较小,并且在低附着道路上容易趋于饱和。尽管在低附着路况下,由于合成控制器的鲁棒性,横向速度的最大值小于0.3 m/s,可以满足操纵稳定性的要求。对于横摆角速度,从图16(f)中得出了相同的结论。图16(g)-(i)显示了车辆在不同路况下的路径跟踪结果。可以看出,最大横向位置误差小于0.03m,最大横摆角误差不大于0.55°,说明所设计的控制器具有良好的路径跟踪性能,满足控制器设计中的性能要求。此外,尽管面临纵向速度的变化和不同的路况,路径跟踪控制器仍能保持鲁棒稳定性并表现出良好的鲁棒性能。
=0.28)有较大的输出值,以保证车辆的操纵稳定性。此外,我们从图16(e)中可以看出,车辆的横向速度随着道路摩擦系数的增加而降低,因为四个车轮的横向轮胎力较小,并且在低附着道路上容易趋于饱和。尽管在低附着路况下,由于合成控制器的鲁棒性,横向速度的最大值小于0.3 m/s,可以满足操纵稳定性的要求。对于横摆角速度,从图16(f)中得出了相同的结论。图16(g)-(i)显示了车辆在不同路况下的路径跟踪结果。可以看出,最大横向位置误差小于0.03m,最大横摆角误差不大于0.55°,说明所设计的控制器具有良好的路径跟踪性能,满足控制器设计中的性能要求。此外,尽管面临纵向速度的变化和不同的路况,路径跟踪控制器仍能保持鲁棒稳定性并表现出良好的鲁棒性能。
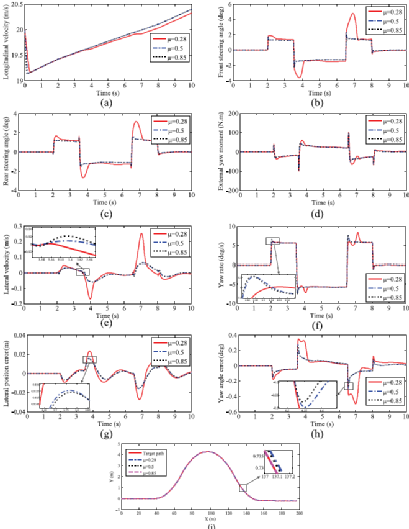
图16 双车道变换的仿真结果
 合成方法进行路径跟踪的鲁棒控制器设计、DYC的控制分配算法设计和横向速度估计的UKF观测器设计。在鲁棒控制器设计中考虑了参数不确定性、外部干扰、测量噪声和未建模动态特性,以提高控制器的鲁棒性能。基于WLS方法,提出了控制分配算法来分配每个轮毂电机的输出扭矩,用于DYC和纵向运动控制。考虑到车辆横向速度难以测量,使用UKF设计了状态观测器。为了评估设计的用于路径跟踪的底盘集成控制算法的性能,基于 CarSim-Simulink平台进行了单车道变换。仿真结果表明,所设计的鲁棒控制器具有良好的路径跟踪性能,UKF观测器能够准确估计横向速度。同时,与其他三种控制算法,即AFS、4WS和AFS+DYC的比较,更加验证了所提出的底盘集成控制算法的优越性。此外,通过不同路况下的双车道变换进一步验证底盘集成控制算法的鲁棒性能。对于路径跟踪控制问题,验证所设计控制算法性能的最佳方法是进行实车测试,这将是以后继续开展的工作。
合成方法进行路径跟踪的鲁棒控制器设计、DYC的控制分配算法设计和横向速度估计的UKF观测器设计。在鲁棒控制器设计中考虑了参数不确定性、外部干扰、测量噪声和未建模动态特性,以提高控制器的鲁棒性能。基于WLS方法,提出了控制分配算法来分配每个轮毂电机的输出扭矩,用于DYC和纵向运动控制。考虑到车辆横向速度难以测量,使用UKF设计了状态观测器。为了评估设计的用于路径跟踪的底盘集成控制算法的性能,基于 CarSim-Simulink平台进行了单车道变换。仿真结果表明,所设计的鲁棒控制器具有良好的路径跟踪性能,UKF观测器能够准确估计横向速度。同时,与其他三种控制算法,即AFS、4WS和AFS+DYC的比较,更加验证了所提出的底盘集成控制算法的优越性。此外,通过不同路况下的双车道变换进一步验证底盘集成控制算法的鲁棒性能。对于路径跟踪控制问题,验证所设计控制算法性能的最佳方法是进行实车测试,这将是以后继续开展的工作。
《Integrated chassis control algorithm design for path tracking based on four-wheel steering and direct yaw-moment control》
文章来源:
Proceedings of the Institution of Mechanical Engineers, Part I: Journal of Systems and Control Engineering, Vol.233, No.6, pp.625-641(2019)
作者:
Peng Hang, Xinbo Chen
原文链接:
https://journals.sagepub.com/doi/10.1177/0959651818806075












![]()
2001-2009 Vogel Industry Media版权所有 京ICP备12020067号-15 京公网安备110102001177号


获取更多评论