激光雷达感知方案
文章来源:CV研习社
发布时间:2021-07-07
本文对不同类型激光雷达的数据进行分析,并且针对机械式激光雷达和混合固态激光雷达视场角不同,在中低速和高速场景下分别对比各自的感知方案。
前沿:
由于混合固态雷达相比机械式激光雷达成本较低,也没有旋转器件过不了车规等问题,所以逐渐得到市场上的认可。
目前已经有不少主机厂采用混合固态或者固态雷达尝试做量产落地。
激光雷达的应用可能是未来无人驾驶的一种发展趋势。
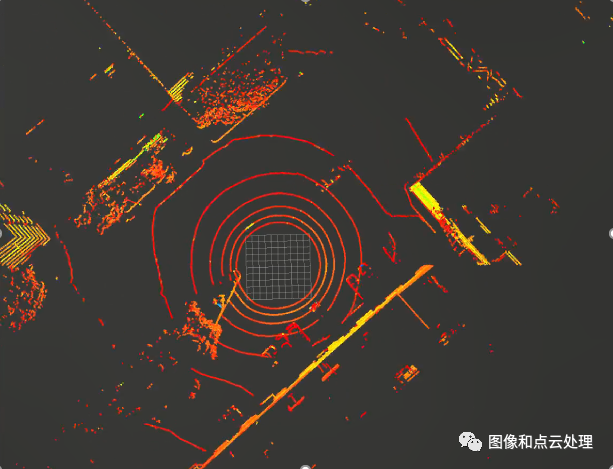
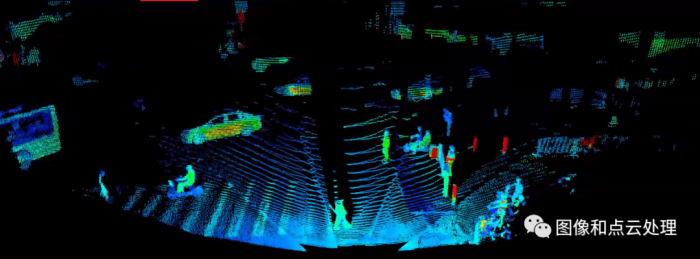
机械式激光雷达在水平方向利用外部旋转部件达到360°的采样,垂直方向根据线束的不同,分辨率也不同。较常用的有16线激光雷达,32线激光雷达,64线激光雷达。下图是一张用Velodyne-16采集的点云图:
Velodyne-16每秒30万出点率,按照10赫兹的采样频率,每帧有30000个点;垂直视场角是30°,在室外场景如果水平安装与车顶,只有水平向下的七条激光线打到的点能有效返回,大约15000个有效点云可供后续感知算法使用。
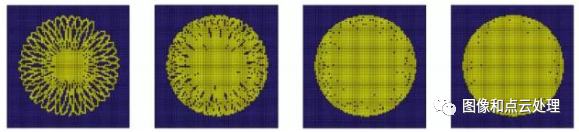
混合固态激光雷达往往采用多棱镜式,将机械旋转的外部结构轻量化、小型化集成到内部,但是仍然有旋转器件。比如Livox激光雷达采样棱镜震荡的方式进行非重复扫描,视场覆盖率随时间推移而显著提高。如下图所示,从左往右随着积分时间越长,点密度越大:
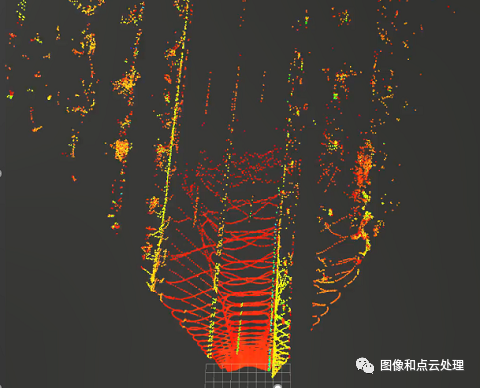
上图是Horizon按照10FPS采样得到的点云,每帧24000个点,除去未反射回来的点,有效点云个数在21000+。
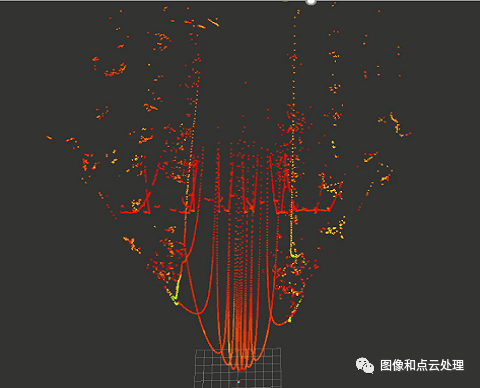
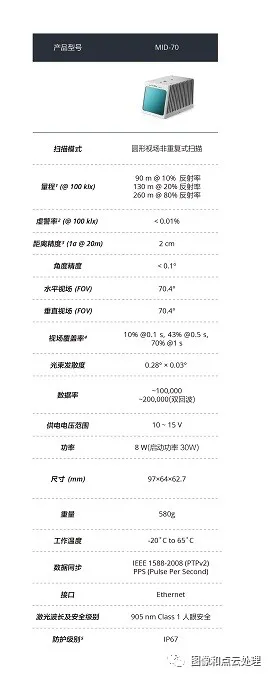
上图是MID-70按照10FPS采用得到的点云,每帧10000个点,除去未反射回来的点,有效点云个数在7000+。因为该产品非重复扫描,所以100ms采样的点云连续帧中物体点抖动严重。使用200ms的积分时间对感知算法较为稳定。
固态激光雷达一般将旋转器件做到芯片中如MEMS方式,或者彻底取代旋转器件,如OPA或FLASH方式。其采样得到的高分辨率点云图密度很高,下图是一张MEMS固态激光雷达采样的点云图:
由于机械式雷达的原理都一样,所以我们用速腾聚创的产品进行机械式雷达感知方案的分析(绝非打广告,只是资料相对多);混合固态雷达的感知方案本文采用览沃科技的产品做分析,因为小编工作上使用过他家的Horizon,MID-70,相对了解一些。
速腾聚创的雷达产品包括机械式激光雷达,如RS-LiDAR-16、RS-LiDAR-32、RS-BPearl、RS-Ruby等;也包括固态激光雷达,如RS-LiDAR-M1。
采用以上激光雷达的组合可以提供应对中低速场景的LiDAR感知方案和应对高速场景的LiDAR感知方案。
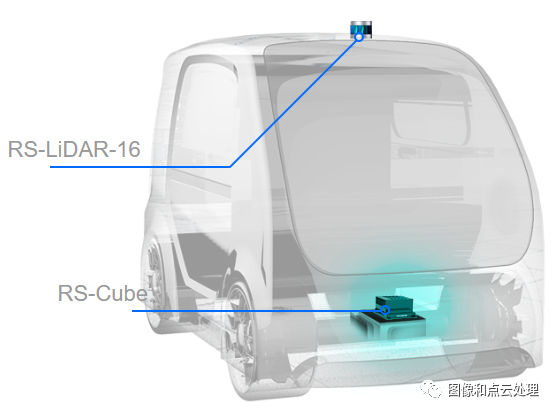
采用单颗RS-LiDAR-16型号的16线激光雷达(或32线),安装在车顶前方。适用于低速近距离50以内的障碍物检测和跟踪。
由于RS-LiDAR-16的垂直角分辨率是2°,导致中距离50米以外的两根扫描线间隔很大,通常提取不到目标的完整特征,所以仅适合做近处的目标识别,和中距离的障碍物检测跟踪。
该低速方案配备单颗16线激光雷达在车身周围存在约5米左右的盲区(具体根据安装高度和倾斜角计算)。需配合其他传感器做一定的补充。
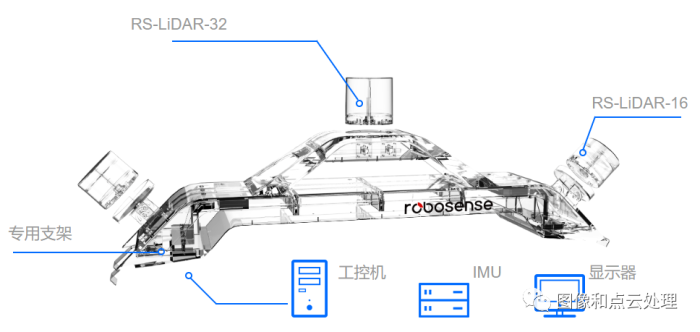
采用一颗RS-LiDAR-32和两颗RS-LiDAR-16的激光雷达做融合,多激光雷达相互补盲,提高点云密度来确保系统冗余性和探测精度。适用于开发地图构建,实时定位、障碍物检测、目标识别、动态物体跟踪等多种功能。
该方案将一颗32线激光雷达水平(略向下倾斜5°)安装与车顶用于中距离的感知,同时在左右两侧分别倾斜安装一颗16线激光雷达用于车身近处的补盲,具体安装如下图:
该方案较好的解决了贴近车身侧面的视野盲区,并且车顶的那颗32线激光雷达水平向下倾斜5°用于减少车前方盲区范围。虽然车前后仍有少量视野无法覆盖,但是可用跟踪算法做一定的弥补。
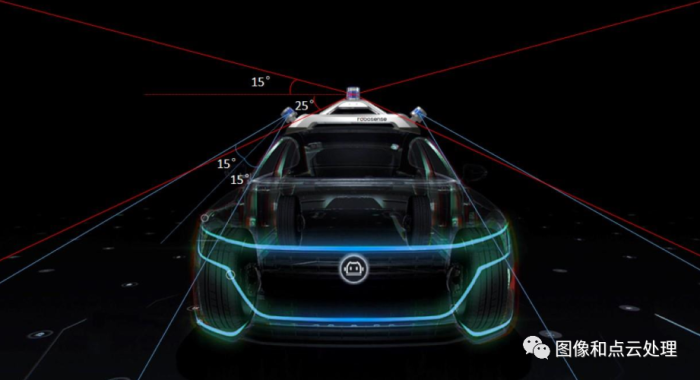
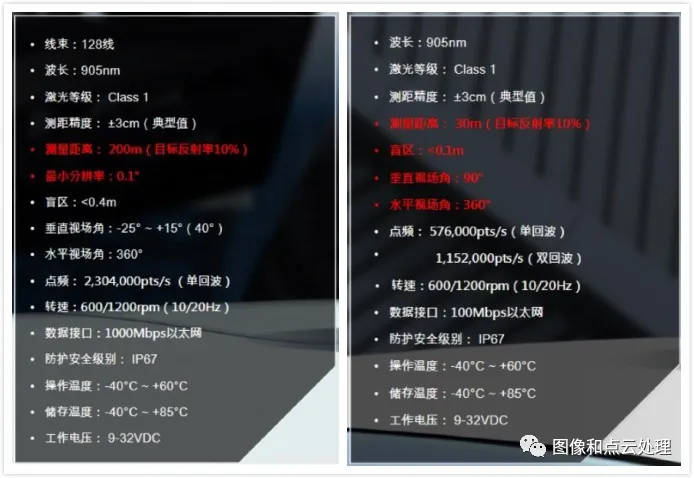
采用了一颗RS-Ruby和四颗RS-BPearl激光雷达做融合,进行全方位无死角覆盖。RS-Ruby是128线雷达可提供高分辨率的点云,如左图所示:测量距离可达到200m,可以在高速场景检测到远距离目标;RS-BPearl是短距离补盲雷达,如右图所示:垂直FOV高达90°。
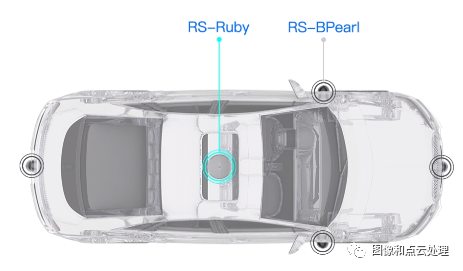
该方案将一颗RS-Ruby安装在车顶,用于360°中远距离的感知;在车身周围分别安装四颗RS-BPearl,利用其超广的视场角覆盖近距离盲区。具体安装如下图:
该方案采用高线束雷达+补盲雷达的方案较好的解决了高速场景远距离障碍物点云稀疏以及近距离视野盲区的问题。缺点当时是贵。
览沃科技的激光雷达均采用非重复式扫描的方式,相比传统机械旋转式激光雷达的重复式扫描,它可以随着积分时间的增加,获得更多的点云。其产品包括MID-40,HORIZON,TELE-15,MID-70,AVIA。根据它们的视场角和数据率,MID-40一般多颗组合使用,HORIZON偏向于做中距离的雷达感知,TELE-15偏向于做远距离的雷达感知,MID-70偏向于做补盲的功能。
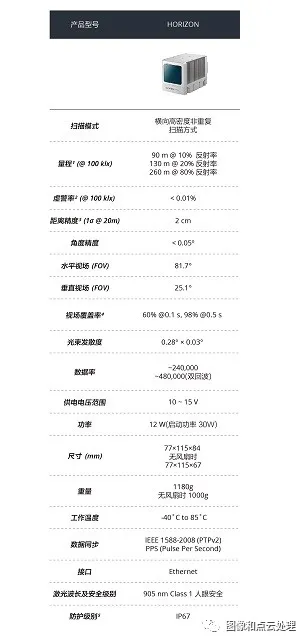
Horizon是一款类似矩形视场角,FOV等于81.7°×25.1°,采用横向扫描方式的激光雷达。搭载五颗Horizon可实现 360° 全视场覆盖。可用于做障碍物检测,识别,跟踪,建图,定位等功能。
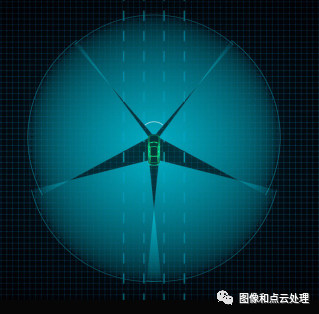
该方案在车头左中右三处分别安装一颗Horizon,用于感知左侧,前方,右侧的环境信息,在车尾左右两处分别安装一颗Horizon用于感知左后方和右后方的环境信息。如下图所示:
通过五颗水平视场角81.7°的激光雷达达到360°全覆盖。
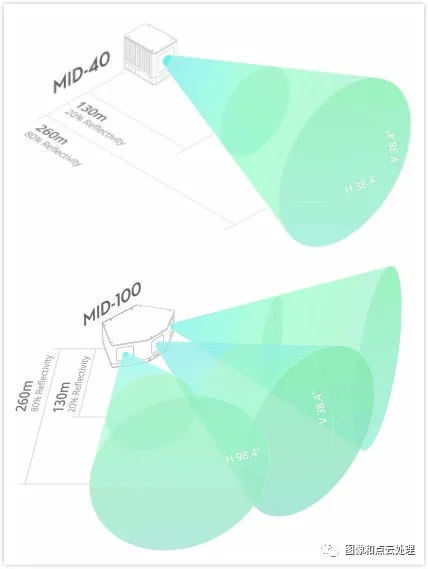
此方案有一个早期版本,利用三颗MID-40组合成一个MID-100:
应该是出于三个MID-40加起来的水平视场角大于一颗Horizon水平视场角,并且车后方左右两颗Horizon重叠率略显不够的原因考虑,官方曾给出用两颗MID-100替代车后方两颗Horizon的方案:
当然多个雷达的数据融合始终没有一个雷达采样的数据精确,建议还是选用第一种方式。
该方案从视场覆盖率角度确实达到了360°,但是车身左右两侧仍然存在小块盲区,当然这部分可以通过跟踪算法弥补掉。由于Horizon的有效检测范围在80米以内,所以只适合做中低速的感知方案。
MID-70是一款圆形视场角在水平和垂直方向上均可达 70.4 °,近处盲区大幅度降至 5 厘米的激光雷达。更大视场角和更小盲区帮助机器人更全面探测周遭环境,及时避开细小障碍物,适用于物流车、机器人等低速场景。
该方案在车辆正前方和车尾左右两边分别安装一颗MID-70用于前方和侧向补盲,由于MID-70的有效检测范围较短,如需增强前向环境感知能力,可在车前方左右两侧分别安装一颗Horizon用于中距离感知:
该方案采用圆形视场角的MID-70补偿了贴近车身的盲区,尤其是增强型方案配合Horizon的中距离探测,较好的提供中低速场景的环境感知能力,唯一缺陷就是后向无法探测来车情况,如遇转弯,变道等情况较难应对。
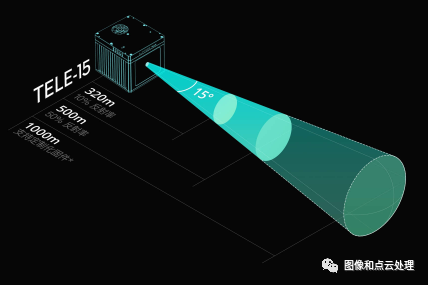
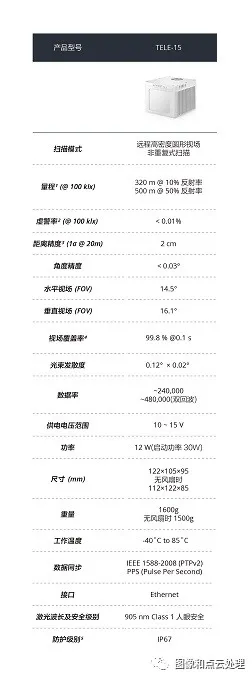
Livox有一款专为远距离、高精度探测打造,可感知 500 米外的障碍物,且体积小巧、可靠性强的激光雷达Tele-15。可在高速行驶中为车辆带来更充裕的响应时间,保障安全。
虽然Tele-15的探测范围很远,但是其视场角只有14.5°×16.2°,所以在高速场景中往往与Horizon配合使用。产品属性如下:
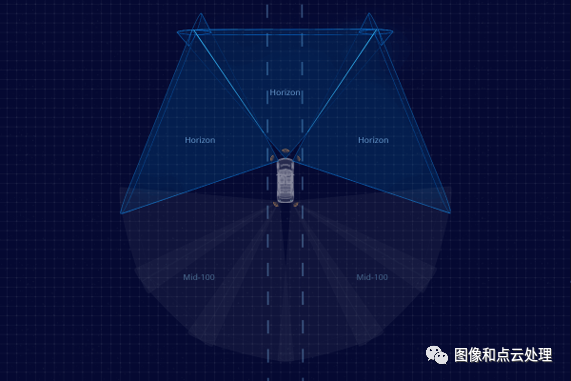
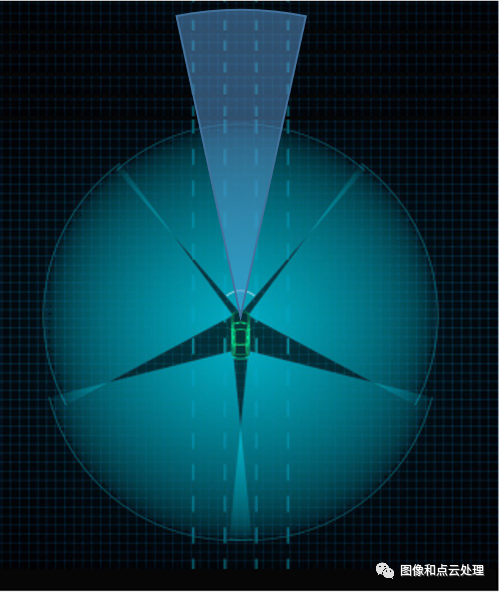
高速场景的感知通常都有对后向来车的探测需求,需要有360°全方位的覆盖,我们可以在上述中低速感知方案1的基础上采用五颗Horizon+一颗Tele-15的方式实现,将Tele-15安装在车顶前方用于探测远距离障碍物:
该方案基本满足了远中近不同区域的探测,但是livox积分采样在高速场景下存在目标拖影的问题,即使是100ms的积分时间,高速运动的小汽车也可能在一帧数据中被拉伸成一辆小型卡车,不同速度造成的物体形变是否可能通过DNN算法来泛化特征值得考量。
本文介绍的几种激光雷达感知方案较为通用,将探测远距离的激光雷达+探测中距离激光雷达+补盲雷达配合使用。但是各家公司会根据实际需求和应用场景做相应的变化,比如针对低速场景,考虑成本问题也可用一颗MID-70置于车头,通过延长积分时间的方式增加点云密度,左右两侧安装超声波用于近距离探测等变体形式。

















获取更多评论