L4级自动驾驶系统如何保证行车安全
文章来源:焉知
发布时间:2021-08-11
问题来了,对于L4级来说又如何保证驾驶安全性呢?
类型来源 |
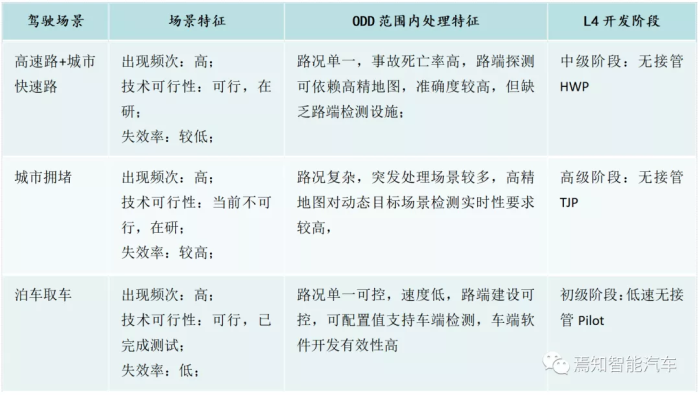
场景描述 |
静态道路信息定义的ODD |
车辆行驶在非指定区域,如重庆市内内行政区域,判定车辆电子围栏内时,其他行政区判定车辆电子围栏外; |
车辆行驶在自动驾驶能力不能覆盖的道路时,如曲率、坡度过大时,判定车辆在电子围栏外; |
|
车辆行驶在JCT道路上,从一条高速路进入另一条高速路,判定车辆处于电子围栏内 |
|
车辆行驶在IC道路上时,即将从高速路进入一般公路,判定车辆处于电子围栏外 |
|
车辆行驶在匝道、收费站、隧道或其他人工指定的L4级可能无法处理的驾驶区域时,判定车辆处于电子围栏外 |
|
车辆行驶在高速、城市快速路主路区域,判定车辆处于电子围栏内 |



整车 |
半开放/开放道路测试(覆盖全国每1公里高速/环路道路测试4次) |
|||
功能 |
高速/环路; 台架、封闭场地测试 |
自主泊车; 台架、封闭场地测试 |
城市拥堵; 台架、封闭场地测试 |
单件测试 |
模块 |
感知; 数据包测试、仿真测试 |
DPS; 仿真测试 |
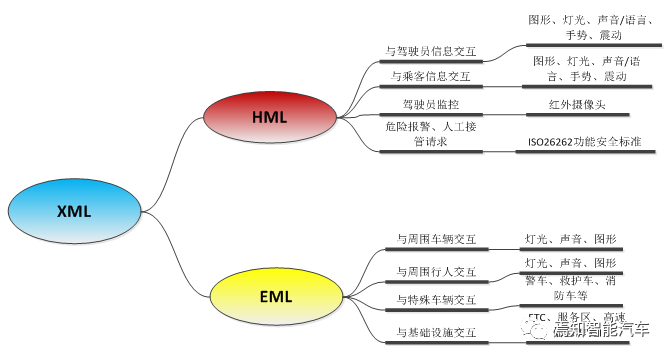
XML; 台架测试 |
硬件; 台架测试 |
OTA升级项 |
推送速度 |
推送频次 |
驾驶安全、BUG、地图类更新 |
天级 |
随时 |
功能升级更新 |
季度 |
固定频次、每季度一次 |
新增功能更新 |
约半年到一年 |
按照版本计划设定时间 |












![]()
2001-2009 Vogel Industry Media版权所有 京ICP备12020067号-15 京公网安备110102001177号


获取更多评论