面向未来电子电器架构的重构四步骤
文章来源: Vehicle
发布时间:2021-11-08
本文借用恩智浦的技术培训PPT,对面向未来的电子电器架构重构的实施路径进行分享,希望能从以下几个方面给大家带来一些见解。
如果说传统的整车平台物理架构是保证你四化的基础,那么电子电气架构确是决战四化的前提,他是主机厂灵魂的载体,只有正确的电子电器架构才能承载四化,才能支持软件定义汽车。
所以本文借用恩智浦的技术培训PPT,对面向未来的电子电器架构重构的实施路径进行分享,希望能从以下几个方面给大家带来一些见解:
至于为什么要改革,首先是整体的汽车行业发展趋势,智能化,电动化,以及软件定义汽车。智能化,电动化的发展极大的触发了整车的传感器数量,以及数据量和处理量这是以CAN时代无法进行负载的,以分布式ECU无法高效处理的。软件定义汽车的要求整车通讯互联甚至中央控制这些都让当前电器架构从逻辑上和物理上都无法满足要求。
再次通过之前CAN时代对电气架构做加法的方法,显然从成本,稳健,功能都无法胜任。他需要面对的挑战有成本,重量,复杂度,
这些都是当前四化的壁垒。而目前四化需要的是安全冗余,可拓展,硬件软件解耦,当然还需要面对成本的折中方案。
所以当前的电子电器架构亟需改革,从功能沟通的逻辑上到物理连接布置上。
-
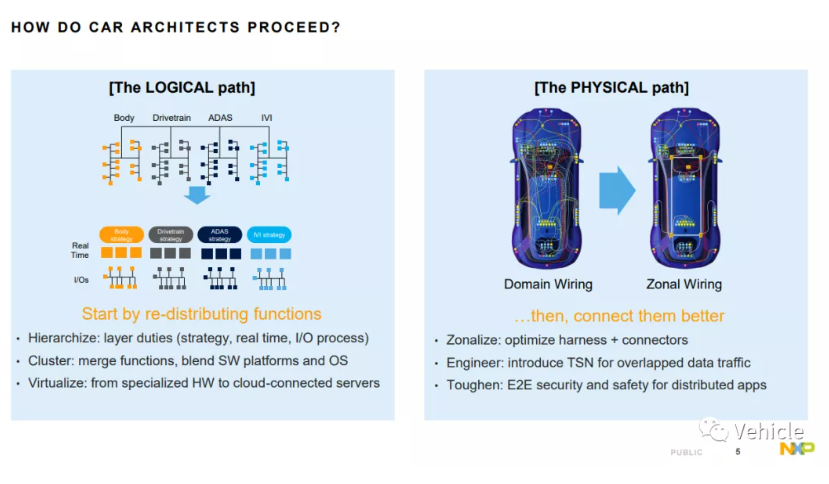
分层,对功能逻辑进行分层,策略层,实时控制层,输入输出层
-
-
-
-
引入TSN( time sensitive networking)以太网以应对重叠的数据沟通
-
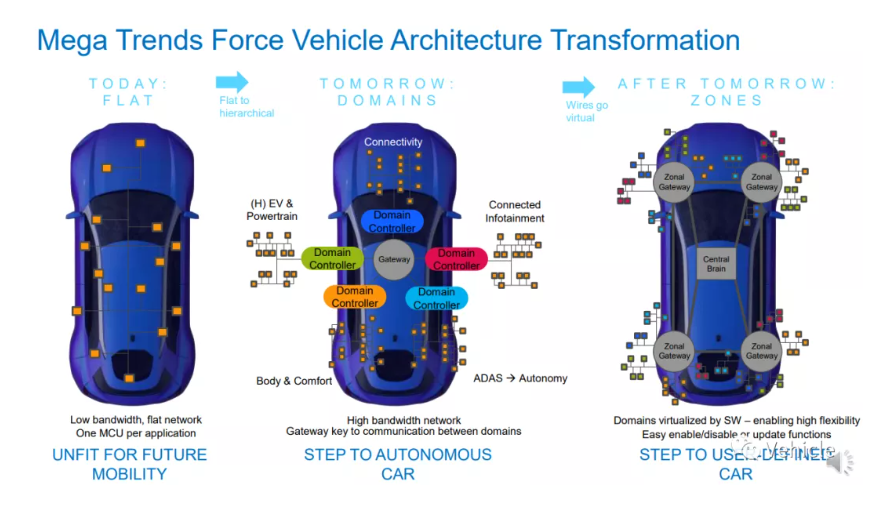
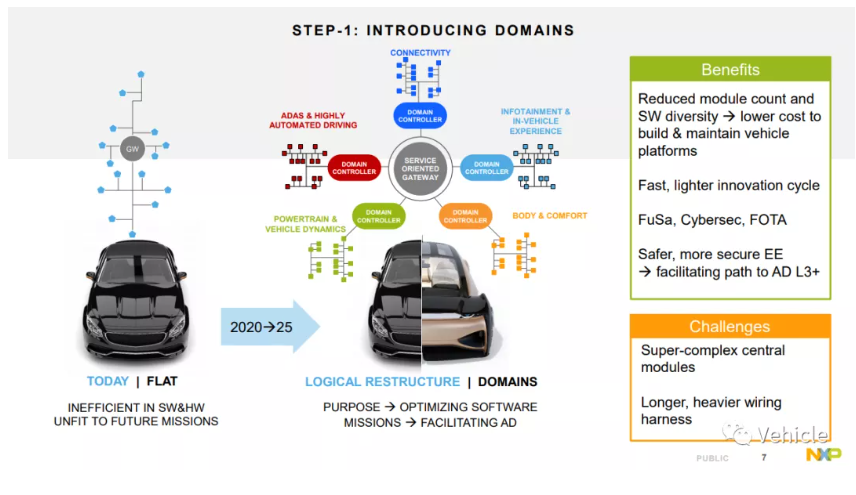
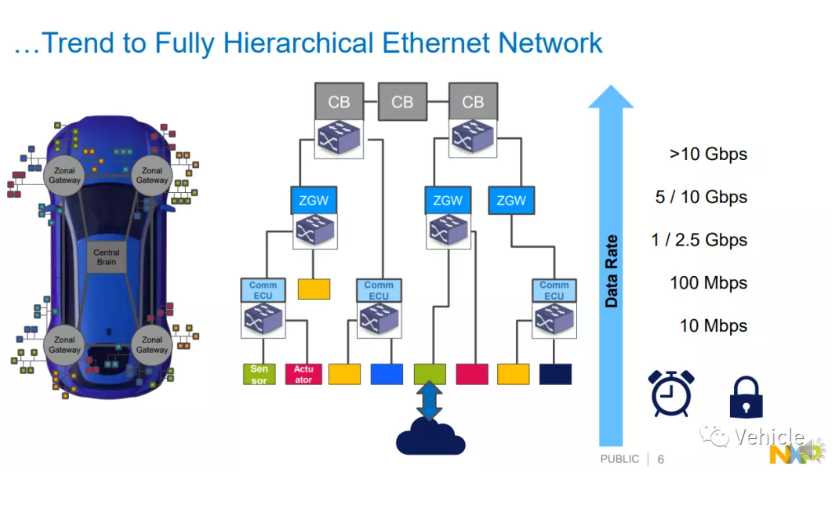
显然最原始的电子电器架构如上文讲到,是扁平的所有的ECU没有分层融合大家;而随着功能的需求,数据量和传感器的总类增加为了高效的进行整合进行集合域控制,所有数据通过中央网关进行通讯;未来的发展软件定义汽车需求必须是中央区块化,中央处理器集中控制,区块化集合功能。
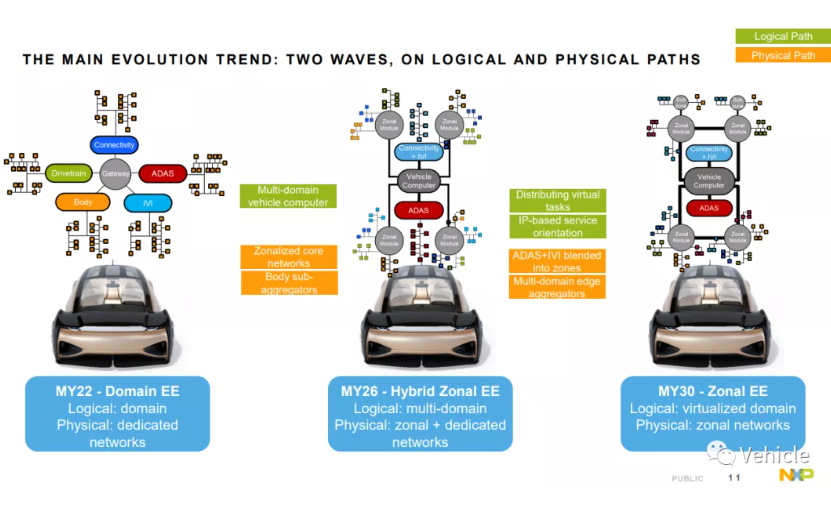
所以电子电器架构的趋势是从扁平化到域控制再到中央区块化。
域控制器
,根据恩智浦的规划他们2025年基本完成,其实对于豪车以及部分新势力或多或少已经完成。根据开发流程以及周期来看要2025年实现那么其实现在所有的还未完成的主机厂应该都在布局或者研发之中。
域控的好处是,可以减少控制模块数量以及硬件复杂度,可以实现安全和在线升级,可以实现自动驾驶L3。
当然域控的挑战有,超级复杂的域控,更长更重的线束。
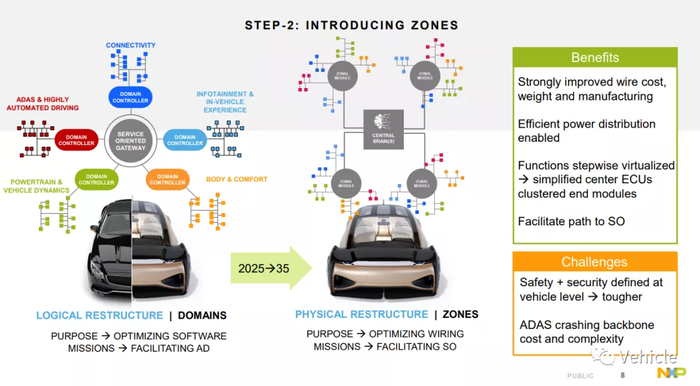
那么更先进的中央区域控制来了,恩智浦觉得到2025年开始到2035年基本会切换成中央区域控制。
中央区块化控制的好处是,极大提升线束成本重量以及制造,使高效的能耗分布,简化其他ECU,促进软件定义汽车的实现。
中央区块化面对的挑战会是,安全,以及对于自动驾驶安全控制的成本和复杂。
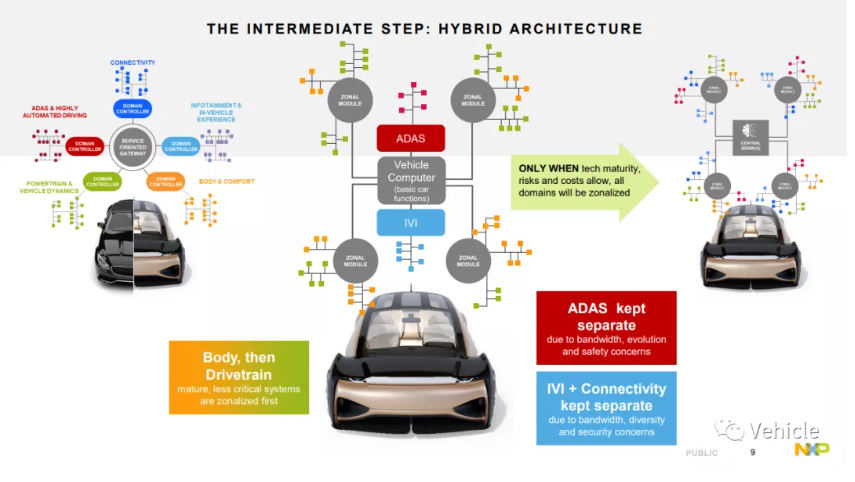
从域控到中央区块化进化
,汽车关系到安全而非消费电子娱乐,汽车的事故关系到车内的以及车外的安全。所以只有技术成熟以及未来风险和成本的可控才行,显然目前存在不少挑战。
那么目前一种方案为,域控和中央混合架构。把车辆的车身,动力,运动执行整合进入中央控制器,把影响安全的自动驾驶,和娱乐系统域控化。
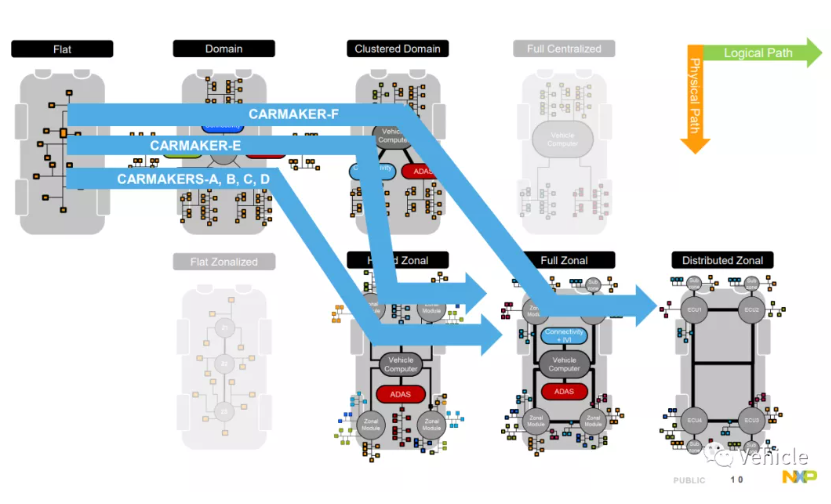
但对于汽车行业,每家的情况还不一样,例如家用车和豪车显然电子电器复杂程度不一样,所以每家电子电器架构演化的方式不一样。大体相同只是大家对于整车以太网等通讯方式选择不同。
通讯以太网高速化是未来趋势,CAN FD可能依然保持对于执行架构的通讯。
电子电器架构从扁平化到域控再到中央区块化,但其中域控到中央区块化进化会存在混合架构的过渡。
电子电器架构的通讯,对于各个域控或者区块通讯高速化,高速以太网是趋势,执行架构通讯CAN依然保留。
至于如何进行电子电器架构改革,重构是恩智浦给出的方案,其中给出四个步骤:
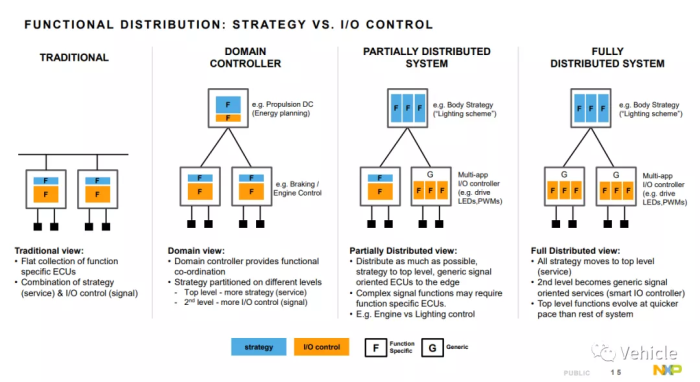
分配功能,
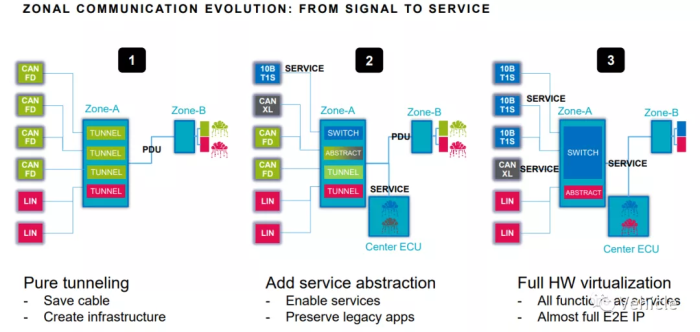
传统的电子电器架构其某一个功能包含功能策略以及功能输入与输出执行两个部分;到了域控,其实域控提供的是功能的协调,对于单个功能策略和执行没有本质变化;分布式系统,把策略控制和执行分开,当然还有部分分布式,也就是特殊的功能依然保有策略。
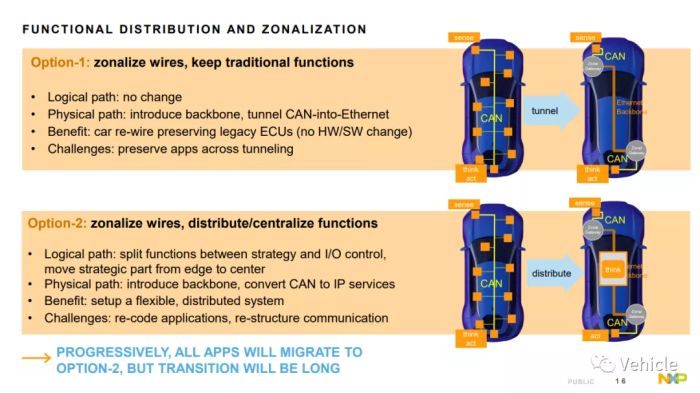
分配功能的时候,对于功能之间的信息沟通,恩智浦给出了两个选择:
-
区块化线束,保持逻辑不变-引入以太网做为信息沟通骨干网,他的好处是重新布置线束保留传统ECU无须变化,但挑战是未来跨功能应用。
-
区块化线束,分布和中央化功能-逻辑上把功能策略层和执行层区分,物理上引入以太网和把功能地址IP化。
他的好处是建立灵活的分布式系统,挑战是需要大面积重写应用代码和重构沟通。
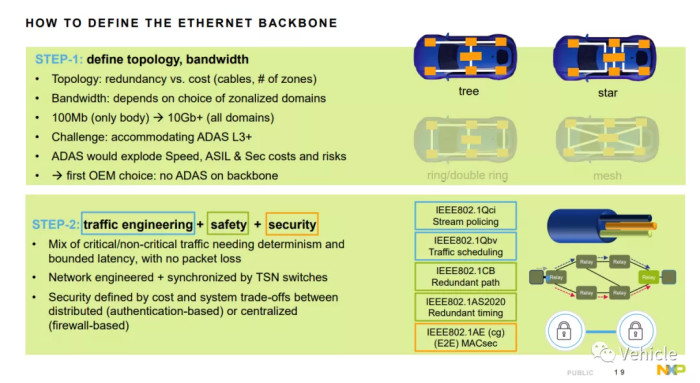
那么这个时候区域沟通的骨干网定义就上场了,定义骨干网有两个步骤:
-
定义拓扑,和带宽-拓扑需要考虑冗余和成本的均衡,带宽要考虑区域化的域控例如车身模块100Mb足够,但所有的域控10Gb以上。所以这个步骤里面需要特别注意的是L3级别以上的自动驾驶,他的带宽和安全等级,所以目前很多OEM选择的是不把自动驾驶并入骨干网。
-
考虑通讯工程,安全-当把关于功能安全和非功能安全的通讯混合时候需要考虑延迟以及丢包问题,所以一般考虑网络工程和同步TSN 交换,当然安全需要考虑成本以及系统的分布和中央化的均衡。
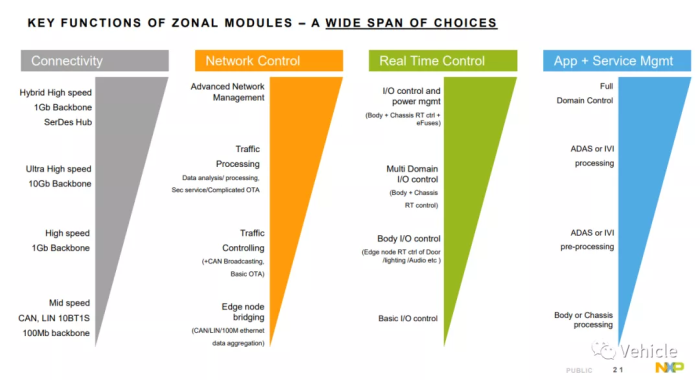
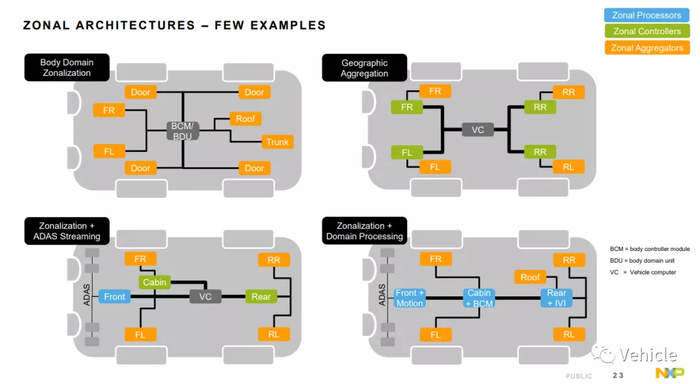
接着就是定义区域模块,定义区域模块时候需要考虑四个因素,互联性,网络控制,实时控制,应用和服务管理。
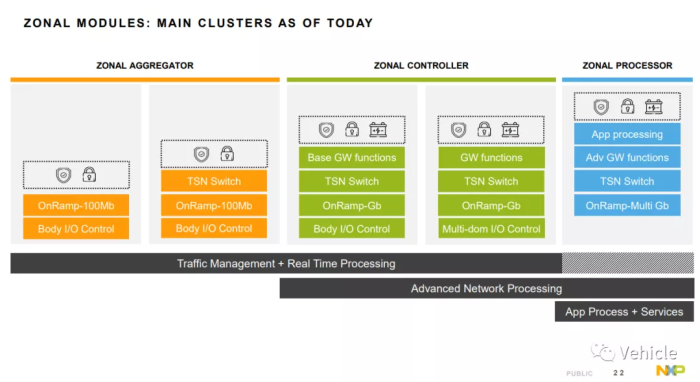
对于区块化模块,根据当前的情况可以分为,集合,控制,处理三种。
集合相对简单就是通讯或者网关,交换以及信号的输入与输出;控制就是在集合的基础上增加网关功能;处理,除了输入与输出具有网关,交换机和应用处理。
例如上图,车身控制器分布到车身其他的区域为区域集合;几何集合中区域控制和区域结合在整车控制器的结合下运行;区域和自动驾驶中自动驾驶传感器集合进入区域控制,其他和几何集合类似;最后区域加域处理,直接域处理发送到区域集合进行执行。
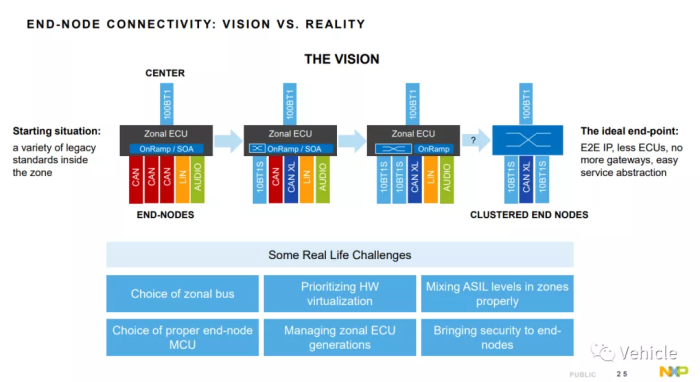
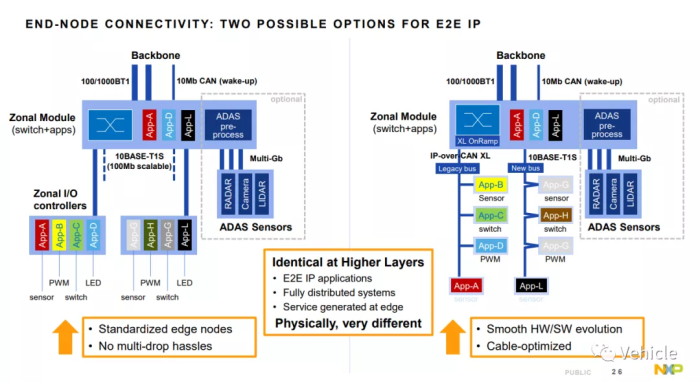
最后就是定义终端连接,终端连接就是末端执行机构的连接,目前终端连接通过CAN,Lin,Audio多种形式,未来发展以太网和CAN的连接,但其中会存在多种的过度,但趋势是以太网。
-
软硬件不强烈变化下,传统CAN通过以太网交换机分配IP 通讯。
-
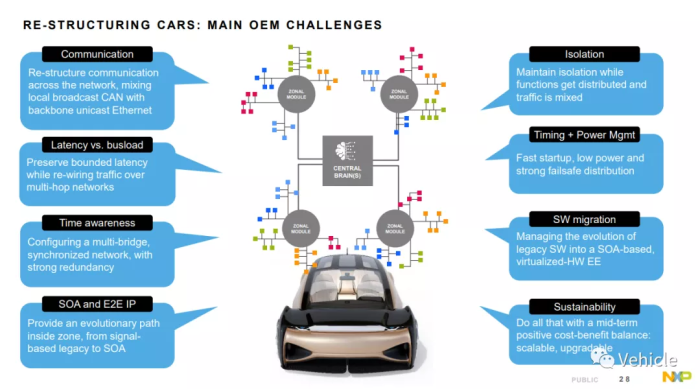
电子电器架构的趋势是明显的,路径也是明晰的,但道路确是曲折的,汽车是一个长周期,重资产投资的产品,一般车型4-5年的开发上市期,特别是传统汽车主机厂一般考虑投资盈利基本上都会兼顾过去,同时考虑未来,当然新势力也不例外毕竟也是延续大部分当前的汽车产业链。
所以一般都有以下挑战:混合通讯CAN和以太网;延迟和负载;时效性冗余;从传统信号传递到软件定义和终端IP;根据安全需求的隔离;时效性和电源管理;软件的迁移;可持续性的拓展升级需求。
识别朝着正确的未来电器架构的路径 - 恩智浦
恩智浦的功能安全和车辆以太网观点 - 恩智浦
网关以及车辆网络处理的升起和改革 - 恩智浦








正在获取数据......