如何看待汽车里面光学的应用未来?
最近在做一些深度的研究工作,每天在想一些好玩的东西。汽车工业其实运用了大量的基础学科知识,比如物理学;而光学就是其中极为重要的一项。
从光学系统而言,核心技术主要聚焦于发射器、光学元器件+微型模组、探测器、以及集成电路和算法。
备注:我本人是读仪器的,烟烟读的是光信息,其实这两个其实都包含了光学部分,只是我们两个都没深入。
从大的方面来看,可以分成:围绕人开车、围绕自动驾驶辅助系统开车的技术方向(终局是机器开车)。
Part 1
围绕人开车来展开的技术
为驾驶视距和车辆交互服务的汽车灯光系统:
(可以追溯到1910年,当时最早的电气式前照灯被发明),而之后为驾驶员服务的各种灯光就是一门显学,后制动灯、尾灯以及仪表辅助灯等系列依靠光的反射原理的应用沿用至今。从逻辑上来看,只要人开车,就需要有灯光,而且灯光越来越智能。
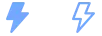
▲图1.Yole做的车灯市场价值预估
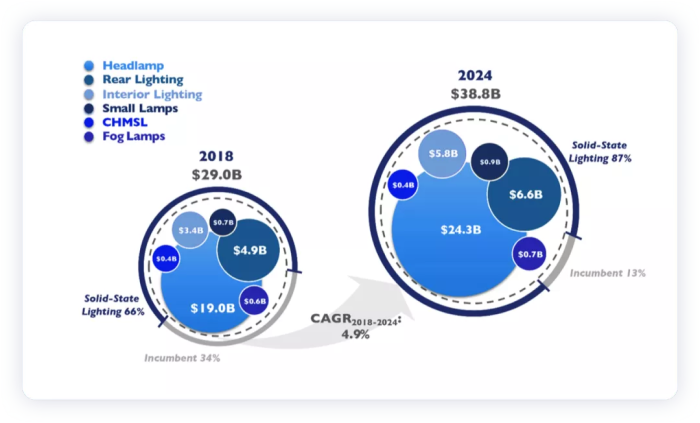
从灯光系统来看,围绕着改善灯光系统的智能性,把摄像头技术和单独的灯光控制剥离出来控制,建立灯光系统的单系统智能,如下图所示。
▲图2.智能灯光系统也是围绕摄像头技术开展
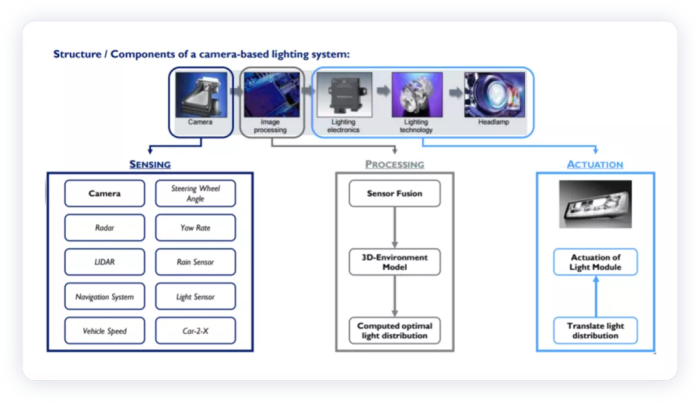
这里的发展分水岭,就是ADAS开始往更高阶的自动驾驶辅助系统发展,之前都是围绕人在各种恶劣天气里面能看清的问题在研究,后者开始关注摄像头能不能看清。
▲图3.人开车还是自动辅助驾驶系统开车
座舱光学系统:
而围绕光学在座舱里面的应用,整个座舱里面的液晶仪表、中控屏幕、HUD、各种内饰氛围灯(这里从脚灯、迎宾灯等等越来越细)这些与驾驶员交互的光学显示的器件,是让汽车具备科技感的新型光学装备。
这块我们单独说。
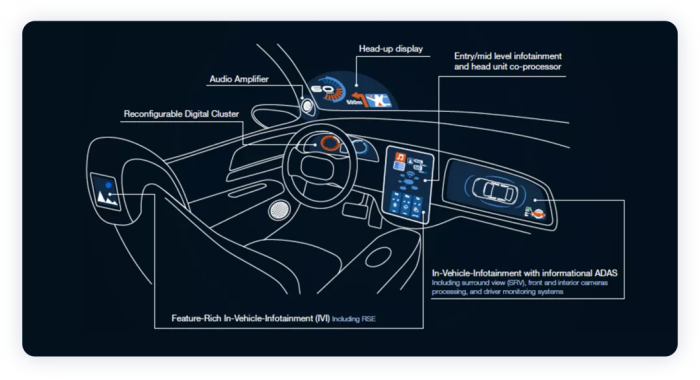
▲图4.这套围绕人的视野聚焦的光学系统
Part 2
围绕自动驾驶
辅助驾驶系统来展开的技术
围绕自动辅助驾驶的主流系统,是构架在车载摄像头这个最重要的光学传感器上的。
●从摄像头来看,光学成像机制可概括为当光线透过镜片后汇聚在图像传感器,传感器记录其图像信息并通过模数转换器将其转化为数字信号,然后交由图像处理器进行后期优化,最终 交给图像处理芯片处理,摄像头模组的主要构为CMOS图像传感器和镜头组。

▲图5.纯粹的摄像头
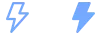
特斯拉是使用纯视觉来实现高阶的自动辅助驾驶,基于Tesla Vision深度神经网络,能够对行车环境进行专业的解构分析,能够充分利用搭载的高性能摄像头。
这套自动辅助驾驶环绕车身共配有8个摄像头,视野范围达360度,监测距离最远为250米。前视主视野摄像头、宽视野摄像头、窄视野摄像头最大监测距离分别为 150 米、60 米、250 米,用来识别物体并为导航提供支持,探测可能影响到车辆的物体,并根据情况采取制动措施;侧方后视摄像头(2颗)、侧方前视摄像头(2颗)最大监测距离分别为100米、80米;后视摄像头最大监测距离50米,在最新的AI day里面有了更详细的论述。
▲图6.特斯拉的摄像头配置
而国内开始一步步在摄像头的数量和清晰度方向开始内卷,智能驾驶首先是对感知摄像头硬件的“军备竞赛”持续升级,极氪 001、智己L7、蔚来 ET7 分别采用了 15 颗、12 颗和 11 颗摄像头(之前5颗摄像头为基准),面向高阶自动驾驶环境感知需求,摄像头变得更高清晰度,以获取探测更长距离和更多信息,以至于车企开始评估8MP像素摄像头感知距离是 1.2MP像素摄像头的三倍。
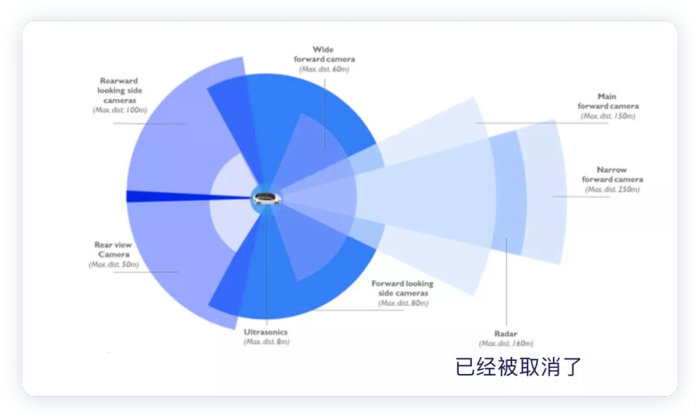
●从激光雷达这条路径来看,国内外开始围绕短、中、长距不同情况的激光雷达需求进行开发,而且围绕泛光式、纯固态、MEMS、机械扫描等不同的激光雷达技术路线在迭代。
这条技术路径还没有取得整个行业的一致意见就开始往前进发,在车上各显神通了。
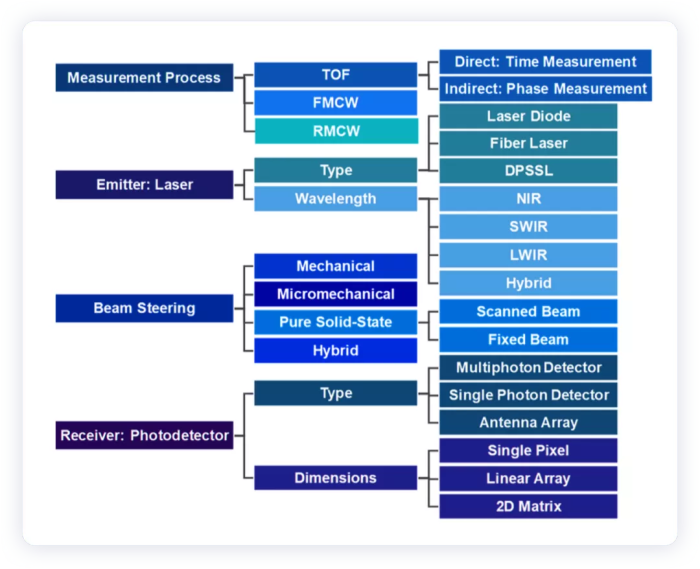
▲图7.激光雷达的差异化配置
小结:光学围绕人开车和机器开车的技术方向,其实都有非常深的演进路径,这个路径基本是由供应商来完成的,在整个光学在汽车应用赛道方面,还是很踏实的。就是智能化如何驱动对光学器件的诉求,特别是对摄像头和智能灯光系统的软件整合,包括座舱系统对仪表、中控的集中输出,都带来软件和硬件分离的必然模式,在这里如何思考这个价值量,需要仔细评估。












![]()
2001-2009 Vogel Industry Media版权所有 京ICP备12020067号-15 京公网安备110102001177号


获取更多评论