TI 第二代雷达芯片深度剖析
文章来源:凡知杂货铺
发布时间:2022-02-10
深度剖析TI 第二代雷达芯片,详见正文。
车载雷达是高级辅助驾驶(ADAS), 无人驾驶核心传感器之一,而车载雷达芯片是车载雷达的核心,如今高度集成(MMIC + DSP/MCU)的车规级芯片为雷达小型化,高可靠性与稳定性,低成本提供关键途径,其重要性不言而喻。
近期,TI公司正式上线下一代车规级高性能车载雷达芯片,
AWR2944
,同时发布与之配套的SDK,mmwave_mcuplus_sdk_04_02_00_01,参考设计工具箱toolbox, mmwave_automotive_toolbox_3_5_0,以及demo参考板 AWR2944 EVM,那么这次发布带来哪些调整与升级,代表TI公司哪些雷达芯片产品设计思路,可能会对车载雷达行业产生哪些影响,我们来个deep dive。
AWR2944 TI定义为第二代车规级高性能车载雷达芯片,目前处于Preview阶段。也就是可以提供芯片样品或者可供评估的demo板,未正式规模量产。
-
AWR2944依旧是祖传45nm RFCMOS工艺,支持76-81GHz频段,最高5GHz带宽。同时芯片支持4Tx4Rx,这也是TI迄今为止单芯片收发天线数目最多的芯片;
-
相位噪声控制较之前的AWR1xxx系列略有提升,达到 -96 dBc/Hz [76 to 77 GHz]以及-95 dBc/Hz [76 to 81 GHz](Phase Noise @ 1MHz);
-
DSS集成自家DSP,只不过型号由之前的C674x,调整为C66x。MSS中的处理器由ARM R4F升级为ARM R5F,硬件加速器(HWA)升级为2.0;
-
首次集成硬件安全模块(Hardware Security Module,HSM),HSM本身主要由一个可编程的ARM Cortex M4核构成,此外,还对boot加入认证及加密机制(Secure authenticated and encrypted boot support)以及支持加密HWA,进一步加强雷达硬件安全;
-
车载通信接口方面,2路CAN全部调整为CAN-FD,并首次支持百兆以太网(10/100 Mbps RGMII/RMII/MII Ethernet);
-
ADC采样率37.5Msps,通道数提升至9路,UART提升至4路,新增CSI2 Rx interface用于采集数据回放;
-
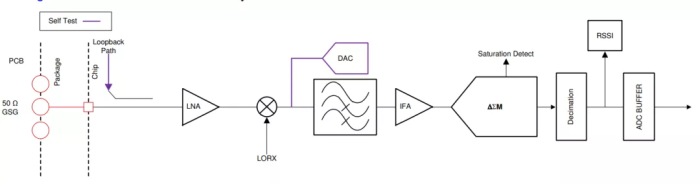
接收端TI抛弃了上一代普遍采用的I/Q正交混频结构,采用I路混频结构(如下图)
▲ Receive Subsystem (Per Channel)
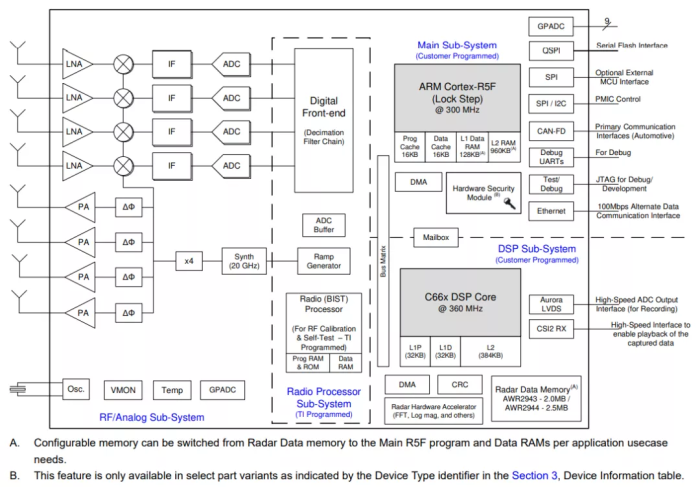
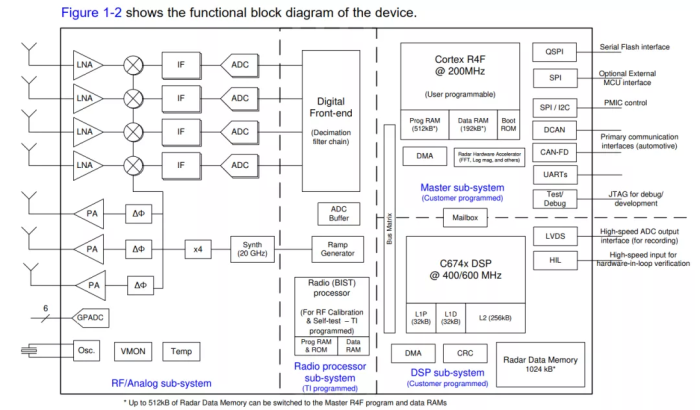
硬件架构如下图,AWR2944依旧是清晰的模块设计,前面介绍的各种调整与升级基本一目了然。我也放了AWR1843 的框图,大家方便对比。
▲ Functional Block Diagram(AWR2944)
▲ Functional Block Diagram(AWR1843)
由此可见,作为第二代高性能雷达芯片,AWR2944调整升级的地方确实还蛮多。但是参数功能终究只是表面,我们还得看看这些调整升级背后的深层次逻辑。
我在“下一代角雷达-从SRR600说起”介绍过Conti下一代角雷达样态,在大FoV条件下实现远距离目标高精度感知是基本要求,这对雷达测距性能,角度FoV,分辨率及精度提出新挑战。
2944较前代又多集成一路发送通道,以实现更高角度分辨率及精度,同时也为更多复杂天线布局设计提供芯片层面支持。
通常远距离感知主要由天线设计解决,相对聚焦的波束测得更远,同时压缩了FoV,在大FoV条件下实现远距离测距是比较困难的,一种途径就是多天线同时发送,比如4路天线同时发射,叠加的宽波束能够在保证宽FoV条件下,距离测得更远。但同发的问题在于接收端对叠加的波束可靠分离较为困难。2944采用了全新的DDM-MIMO通道分离方案(下文会详述),在同发的基础上实现可靠的通道分离,基本实现大FoV条件下远距离目标高精度感知。并且这一切几乎全由硬件加速器实现(只有部分少量计算由DSP介入),因此TI 将HWA顺势升级为2.0。
同时提高RAM容量以平衡通道数提升以及算法复杂度提升带来的内存开销增大。以太网接口的加入也是应对雷达输出点云等数据量提升问题。
1代芯片中,打头阵的是1642,DSP是绝对的计算核心,用于几乎全部的信号处理及数据处理任务。MCU基本只用于配置,控制及管理等,这是TI对ARM MCU的基本定位。所以MSS及DSS的处理方式并不平衡,用TI的原话就是
In most use cases the MSS is defined as a control domain while the DSS actually executes the DPC.
*/ti/mmwave_mcuplus_sdk_04_02_00_01/mmwave_mcuplus_sdk_04_02_00_01/ti/control/dpm/docs/doxygen/html/index.html
而到了第2代,打头阵的2944中,DSP地位被相当弱化,耗时耗力的信号处理部分基本由HWA代劳,事实上,只要你愿意,整个RSP处理链路皆由HWA实现,TI也希望你多多使用HWA,也因此调低了DSP规格,C66x处理频率只有360MHz,远低于上代C67x的600MHz。并且ARM也被加强,不仅用于配置及控制,也用于上层数据处理,比如tracking,classification也可由ARM处理,进一步分担了DSP的处理任务,这是DSP规格下降的理由。
虽然2944调整升级丰富,带来全新雷达体验,但由于DSP规格降低,以及接收端单路混频方案ADC数量降低等因素, 2944芯片成本不会提高很多。
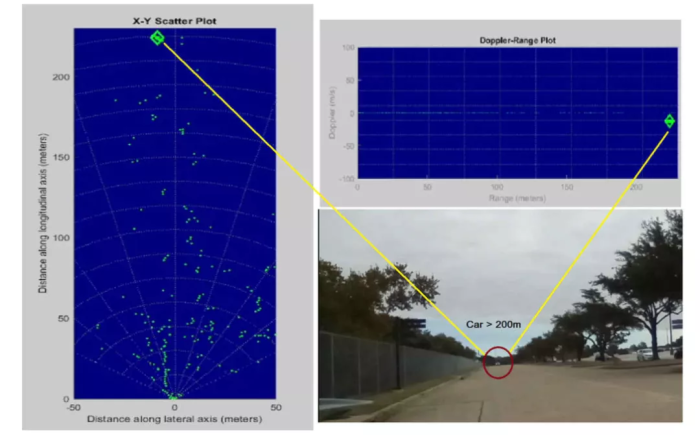
Toolbox中包含满足NCAP R79功能需求的2944参考设计,支持BSD, FCTA,LCA等。demo实现水平FoV ±80°下200m测距,角度分辨率9.5°。比较有意思的是,TI在reference design 的feature栏中加入了这么一句值得玩味的话:Builds customer confidence on mmWave device capabilities,看来毫米波雷达还是比较卑微啊。
EVM与DCA1000结合提供raw data采集能力,为分析原始ADC数据提供支持。
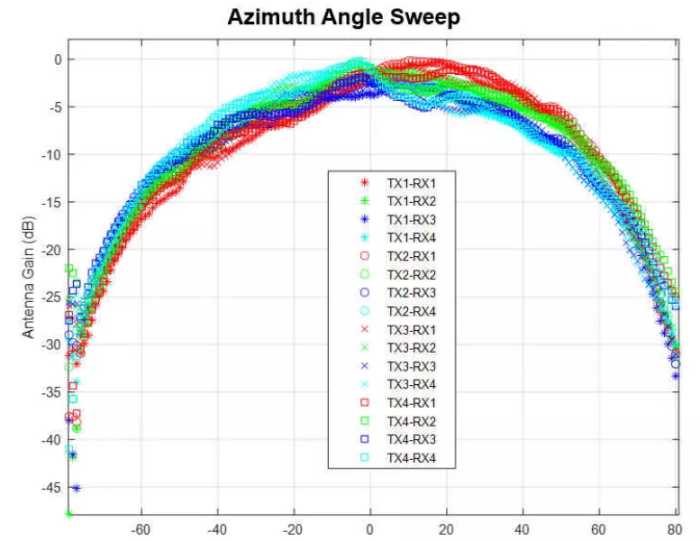
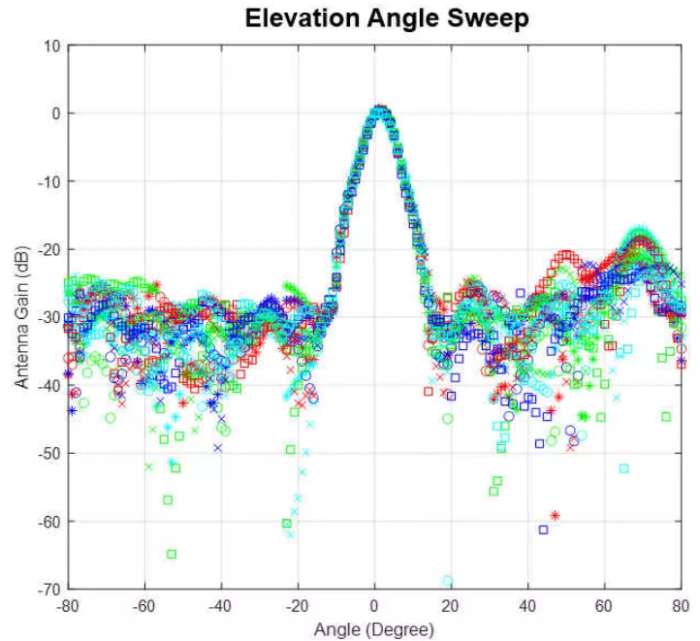
天线频段覆盖76GHz至81GHz,增益13dBi, 3dB波束宽度水平±30°,俯仰±3°。6dB波束宽度水平±45°,俯仰±5°。
▲ Azimuth Radiation Pattern
▲ Elevation Radiation Pattern
TI在SDK 3.x之后设计了全新的SW Framework,引入DPC,DPM,DPU等概念,使得整个软件架构虽复杂但逻辑较为清晰,开发者能够快速上手开发。Framework不是本文重点,不再赘述,聊聊核心升级DDM-MIMO。
我
在“4D雷达之MIMO通道”分离中讨
论过,FDM,TDM,CDM等MIMO通道分离
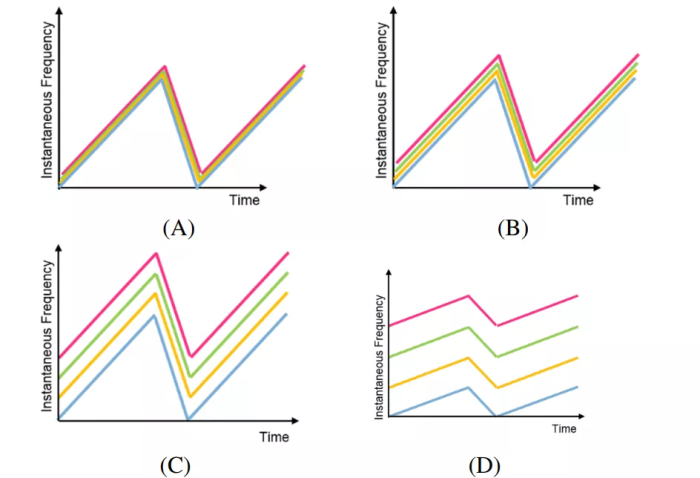
技术。与TDMA不同,FDMA可以实现同发,并利用发射端天线与频率偏移位置之间的映射关系确定通道分离方案。
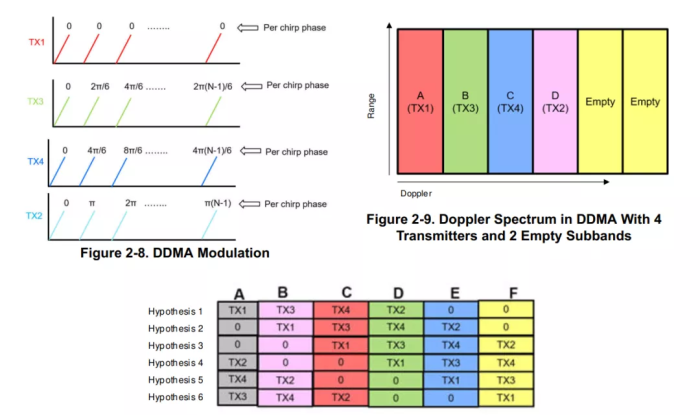
(A) 如果各待分离通道之间的频率偏移量是多普勒分辨率的倍数,则是DDMA;
(B) 如果各待分离通道之间的频率偏移量是dechirp后信号带宽的倍数,则是RDMA;
(C) 如果各待分离通道之间的频率偏移量是最大拍频的倍数,则是BFD;
(D) 如果各待分离通道之间的频率偏移量是chirp带宽的倍数,则是FT-FDMA。
▲ MIMO channel separation
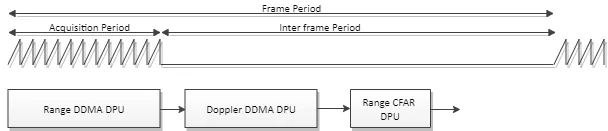
TI实现的是 The empty-band DDMA,提供RangeProc DDMA DPU,以及Doppler DDMA DPU构成DDMA核心实现模块。我简单看了下TI 目前硬件实现的DDMA Demodulation,整体完成度还是可以的。
从DDMA modulation可见,DDM-MIMO对移相器要求很高,TI的移相器精度也需要仔细评估。
▲ Object Detection Data Path Processing Chain
不过DDMA也不是高枕无忧的方案,DDMA潜在问题包括但不限于,
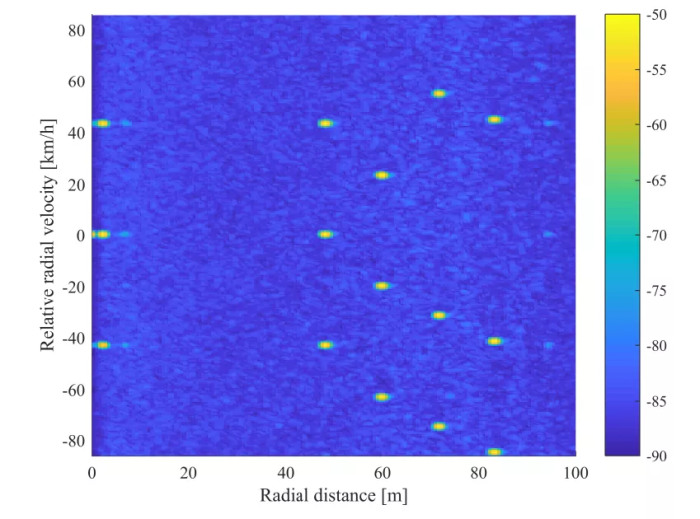
下图为demo实测效果,其测距性能,点云密度,FoV等方面效果还可以,比1代确实有较大提升。希望能够“Builds customer confidence on mmWave device capabilities”。
我们再上升一个台阶,分析TI 2944的发布可能会对车载雷达行业产生哪些影响。
若仅从技术角度分析雷达竞争力,最重要在于天线,MMIC,算法。芯片厂商提供MMIC,雷达厂商因天线及算法上的优势逐渐建立自身壁垒,而这一状态似乎慢慢发生变化。
1、 毫米波雷达正逐渐从“信号处理环节差异性”转向“数据处理环节差异性”,也即是对点云数据处理方式的差异性。TI倡导HWA的使用,将诸多先进信号处理算法固化,用户只需按需取用,信号处理算法正在被标准化,构建雷达底层标准品。
降低DSP的处理频率,提高ARM核心主频,一方面变相引导用户强化对HWA的使用,另一方面也有利于均衡成本。TI也表示:
The Hardware Accelerator block (HWA 2.0) supplements the DSS and MSS by offloading common radar processing such as FFT, Constant False Alarm rate (CFAR), scaling, and compression. This saves MIPS on the DSS and MSS,
opening up resources for custom applications and higher level algorithms.
https://www.ti.com/lit/ds/symlink/awr2944.pdf?ts=1637431154585
雷达厂商的战场慢慢向数据处理,包括跟踪,目标分类,场景理解,边缘AI,数据融合等环节。
2、我始终认为信号处理才是毫米波雷达最迷人的地方。这样的举措无疑导致,雷达厂商从ADC原始数据输出到雷达点云数据输出的所有中间环节掌控将越来越弱。降低RSP层灵活性。也会进一步降低了雷达技术门槛,打破原有雷达厂商部分技术壁垒。由此可见,芯片供应商对雷达厂商的影响会越来越大,芯片厂商顶层的“平权”策略进一步降低雷达厂商之间产品差异性,势必进入低价竞争。
至于后续雷达的升级方向,我觉得信号处理部分会在芯片厂商的影响下部分淡化,由HWA依旧会加强,RSP部分最终可能就是标准品,你需要怎么样的应用,配置下寄存器就好了,竞争可能越来越集中在上层数据处理,整合全新的AI Engine也是很有可能的,某种程度上,毫米波雷达除了频段,会越来越像激光雷达。
[1] AWR2944 data sheet, product information and support | TI.com
[2] euro-ncap-ad-test-and-asse
ssment-protocol-v10


















获取更多评论