篇文章详解基于软件在环的智能网联汽车仿真测试方法
智能网联汽车由于其横跨传统汽车电子、信息通信、人工智能等多领域,集成端-管-云多系统,耦合人-车-交通多维度,带来了功能与信息安全、环境适应性、人机相容性等新问题,传统汽车的测试方法不能满足智能网联汽车开发和认证的需求。软件在环测试指通过传感器建模、车辆动力学仿真建模、高级图形处理、交通流仿真、数字仿真、道路建模等技术模拟车辆行驶环境,在虚拟环境中来检测自动驾驶系统功能和性能有效性和可靠性的方式,是真实路测的有效补充,大大提升自动驾驶测试速度,有效解决极端行驶条件下安全测试的实现问题。由于软件在环测试的仿真测试测试效率高、测试速度快、测试安全性强、测试覆盖场景丰富,在智能化等级不断增强的智能网联汽车测试过程中发挥中越来越重要的作用,已成为验证智能网联汽车安全性不可或缺的手段。因为模型保真度的问题,当前仿真测试尚不能完全替代道路测试,智能网联汽车的测试过程仍需虚拟世界和现实世界的紧密结合。基于软件在环测试主要包括四部分内容:测试环境模型、整车模型、环境感知系统模型、仿真测试技术。

一、测试环境模型



构建虚拟测试环境是进行软件在环测试的基础,其为被测算法的运行提供真实道路行驶的状态,根据道路测试时的智能网联汽车行驶条件,软件在环测试的测试环境模型应包括气象环境、道路环境、动态环境、交通流环境。
气象要素包括驾驶环境温度、光照条件、天气情况等信息。环境温度会影响各元器件的使用精度;光照条件会影响场景采集过程中的能见度,尤其是影响各类摄像头的感知能力;天气情况包括晴,阴、多云、阵雨、雷阵雨、冰雹、小雨、中雨、大雨、暴雨、大暴雨、特大暴雨、阵雪、小雪、中雪、大雪、暴雪、雾、冻雨、沙尘暴、浮尘、扬沙、强沙尘暴、霾等,对传感器的工作精度和工作范围有很大的影响。以激光雷达为例,其发射的激光一般在晴朗的天气里衰减较小,传播距离较远,而在大雨、浓烟、浓雾等坏天气里,衰减急剧加大,传播距离大受影响,工作波长为10.6μm的激光在恶劣天气的衰减是晴天的6倍。
道路环境包括道路形状、路面情况、交通标志、交通表现和障碍物,各种环境模型的具体情况如下。
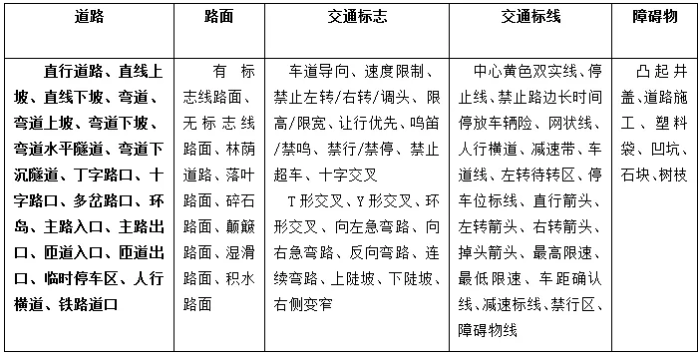
道路环境要素举例
动态环境要素,即在车辆动态驾驶任务中处于动态变化的要素,动态环境要素包括动态指示设施及通信环境信息。动态指示设施包含交通信号、可变交通标志和交通警察等,通信环境信息主要为车辆之间变化的通信状况。动态环境要素在仿真环境中的逼真程度主要体现在三维驾驶场景的质量与用户的交互作用过程方面,动态要素的真实性决定了仿真结果的可信度。
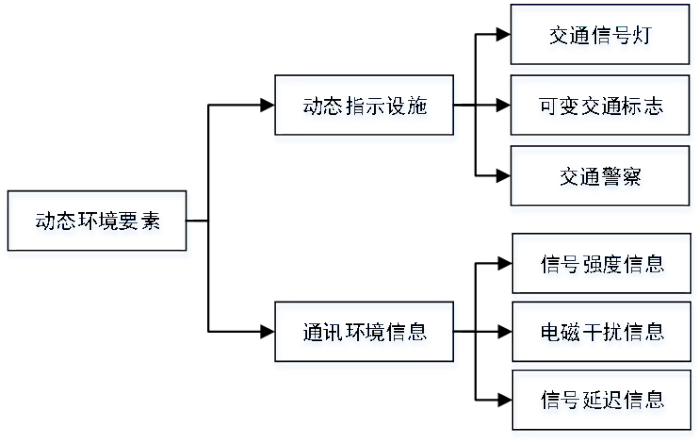
动态环境的具体内容
交通流环境包含两方面内容:宏观交通流环境和微观交通流环境。宏观交通流环境表示一段道路内在一定时间内的整体交通情况,平均交通量,路段平均车速,平均密度是表示宏观交通流的三个基本参数;微观交通流环境表示被测车辆周围的车辆运动状态,包括周围车辆的位置及操作状态。当前宏观交通流模型主要使用元胞自动机的方式生成,设定道路为规则网格组成,每个单元格处于有限数量的状态之一中,对于每个单元格,称为其邻域的一组单元格相对于指定的单元格被定义,通过为每个单元分配状态来选择初始状态(时间t=0),根据一些固定规则(通常数学函数)、单元格的当前状态、邻域中单元格的状态来确定每个单元格的新状态,所有单元格组成的整体即为整个道路交通流环境。微观交通流模型包括被测车辆周围的车辆位置及其对应运动状态,马尔科夫链是最为常用的微观交通流生成方法,其每个车辆的运动状态只与前一时刻的车辆运动状态及对应的概率相关。

二、整车模型



汽车是一个复杂的多刚体系统,其运动是人、车、环境三位一体相互作用的结果,其运动过程中所受载荷复杂多变的,在虚拟环境体现真实的车辆运动状态是整个软件在环仿真的重要组成部分。当前常用的车辆动力学模型包括二自由度车辆动力学模型、三自由度车辆动力学模型、七自由度车辆动力学模型和十四自由度车辆动力学模型。
二自由度车辆动力学模型如下图所示,包括水平面内的横摆自由度以及侧向自由度,该模型将整车简化为单车模型,只考虑对车辆侧向动力学影响最大的整车质量、转动惯量以及轮胎侧偏刚度等因素,忽略了悬架系统的作用。
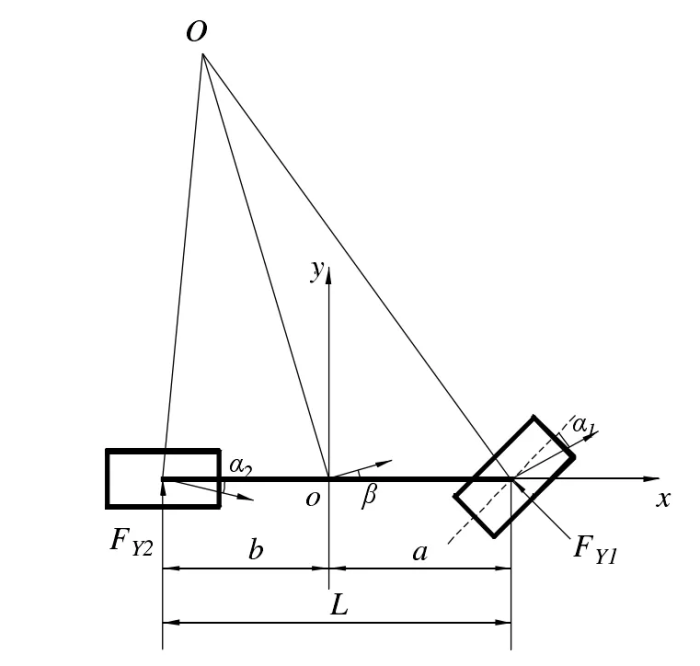
二自由度车辆动力学模型示意图
由图可知汽车质心加速度在x轴和y轴的分量分别是:
根据车辆所受到的外力沿y轴方向的合力与绕质心的力矩可以得到:

式中,、为前后轮侧偏角;、为前后轮侧偏刚度;a、b为汽车质心距离前后轴的轴距。
根据坐标系的关系,可以得到前后轮侧偏角为
从而最终得到汽车二自由度运动微分方程为:


三自由度车辆动力学模型在二自由度车辆动力学模型的基础上增加了悬架系统的影响,建立了包含簧上质量侧倾自由度的模型,如下图所示。该模型以车轮转角作为输入,考虑了车辆行驶过程中的横摆运动、侧倾运动以及侧向运动三个自由度,并首次引入侧倾中心,相比二自由度模型更为准确地描述了车辆的运动状态。
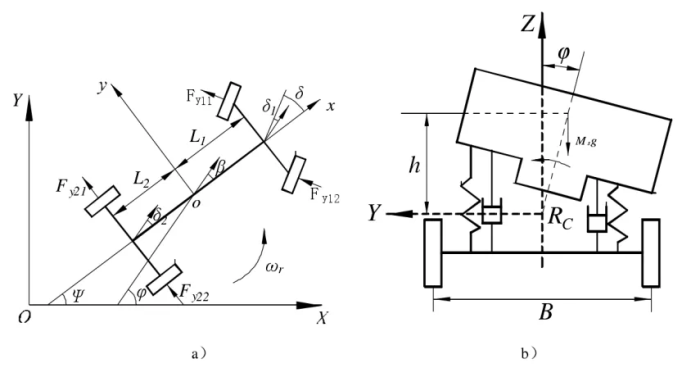
三自由度车辆动力学模型示意图
七自由度车辆动力学模型包括车身的垂向运动、俯仰运动、侧倾运动以及四个车轮的垂向运动,在建立过程中假设:左右车轮收到的垂向激励不同,车辆关于其纵轴线左右对称;车轴与其相连的车轮视为非簧载质量;只考虑轮胎刚度,不考虑轮胎阻尼。七自由度车辆动力学模型示意如下图所示。
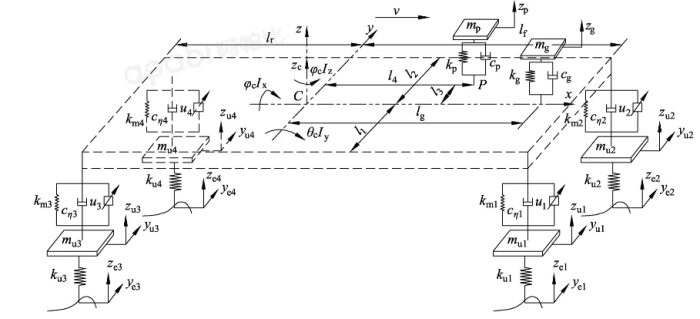
七自由度车辆动力学模型示意图
十四自由度车辆动力学模型包括车身轴向的三个平移自由度及三个转动自由度、四个簧下质量的垂直跳动自由度及其自旋自由,整个模型以转向盘转角和轮心力矩作为输入参量,通过建立各坐标系之间的相互转换关系,定义轮胎、簧下质量、悬架系统和车身等模块之间的相对位置关系并对其运动状态参量进行求解,在求解过程中,做出如下假设:忽略转向系摩擦阻力矩及空气阻力;忽略运动过程中悬架之间的摩擦力;忽略由于路面不平导致车轮相对于车身的上下跳动;除确定轮胎姿态角及其受力分析之外,车轮相对于车身只有垂直跳动和自旋转两个自由度,其余四个自由度不予考虑。整个十四自由度车辆动力学模型如图5所示。
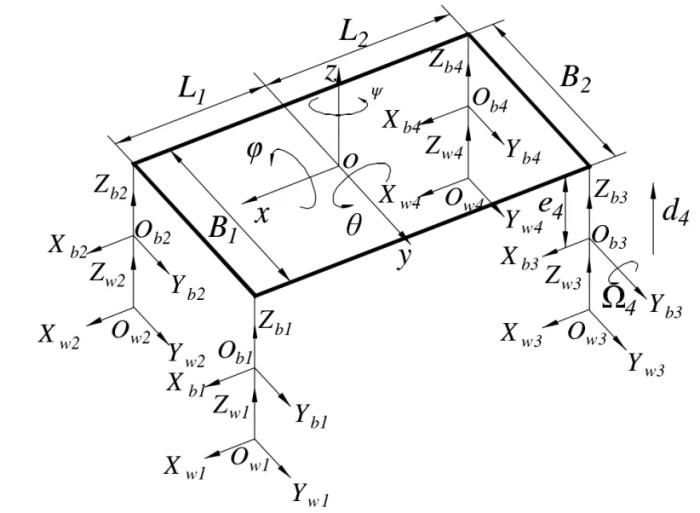
十四自由度车辆动力学模型示意图

三、环境感知系统模型



1.毫米波雷达模型
毫米波雷达模型分成两部分:几何模型和物理模型。几何模型属于功能性建模,模拟理想雷达的功能,不考虑实际雷达探测目标的具体机理,将其发射的电磁波束抽象成椭圆椎体,与搜索空域内的目标物体特征点集求交并输出。物理模型在几何模型的基础上,通过模拟实际雷达信号的处理流程和添加噪声,使毫米波雷达模型更接近真实情况。下文对毫米波雷达的几何模型和物理模型分别做详细的介绍。
毫米波雷达几何模型意在模拟实际雷达的探测功能,不考虑其具体的实现原理和硬件结构,将雷达发射电磁波波束抽象成空间椎体,将场景中感兴趣的目标离散成一系列预先定义的能充分表达出物体形状特征的特征点集PSC(Points of Shape Characteristics),雷达的探测过程被转化成为如何找到被雷达视锥照射到的PSC的问题,这些被找到的PSC应该满足以下两个条件:Ⅰ.位于雷达视锥内;Ⅱ.没有被遮挡,没有任何物体或PSC位于雷达视锥顶点至该PSC的连线上。雷达对周围场景探测的过程就是不断提出场景中的目标物体特征点、最终留下被雷达“照射”到的点集的过程,关键问题是如何快速筛选出符合条件的PSC,流程如图6所示,主要由四部分组成:判断是否在最小可见区域,判断包围盒于视锥的位置关系,判断PSC是否在视锥内,判断PSC是否被遮挡。
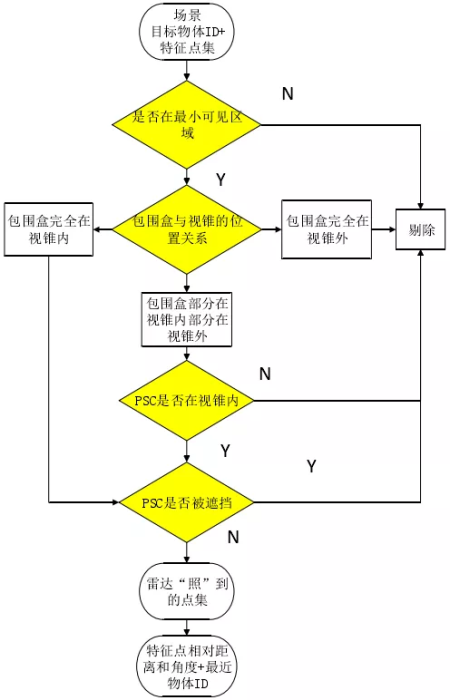
雷达探测过程流程图
毫米波雷达的物理模型参照雷达基本工作原理,如图所示。雷达发射机以电磁波的形式发射能量,该能量经收发转换开关传给天线,天线再向某一方向集中发射至空中,电磁波在空中传播的过程中遇到目标物体,一小部分能量会被目标物体反射回雷达处,反射回的电磁波能量同样由天线接收,并经过收发转换开关,传给接收机,经过信号处理得到目标物体的相对距离、相对速度及角度等信息。
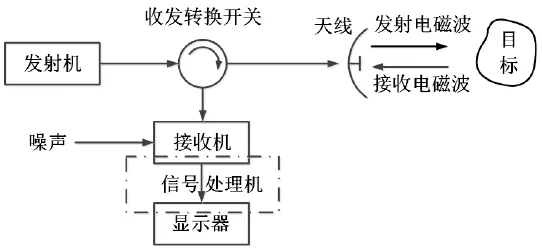
雷达基本组成
2.激光雷达模型
通过分析激光雷达的基本功能和探测原理,激光雷达也可进行几何模型和物理模型的搭建。几何模型用于模拟激光雷达探测功能;物理模型用于描述天气对激光雷达造成的探测缺陷,从天气带来的激光雷达信号功率衰减进行模拟。
几何模型的主要作用是基于虚拟驾驶环境中的目标全局位置、主车全局位置、目标车形状、激光雷达视野进行目标相对位置理想输出的求解。几何模型包含目标模型,激光雷达光锥模型和环境模型。目标模型主要将虚拟目标几何参数化,描述其形状特征并定义关键点,目标可以根据计算需求使用包围盒或更复杂的多面体包络来描述。激光雷达光锥模型主要将雷达包络或单束探测光束几何参数化,定义激光雷达的探测范围,使用直线、棱锥、圆锥和纺锤体来抽象。环境模型主要描述主车与目标车之间的位置及其相对关系。对于目标模拟和点云模拟,使用类似的方法,通过模型参数设定实现不同的模拟功能。几何模型主要包含一下及部分:场景裁剪,根据激光雷达的光锥模型和目标模型快速筛选环境中与光锥相交的物体作为潜在目标;可见判断,根据目标模型的关键点排除不能被激光雷达扫描的潜在目标;遮挡判断,根据潜在目标在环境中的位置以及目标的关键点,排除被遮挡的潜在目标;位置计算,计算余下的潜在目标在激光雷达坐标下的位置信息。
激光雷达物理模型主要考虑功率衰减的模拟,其主要针对不同天气带来的功率衰减影响进行建模,对雨、雪、雾和霾等天气进行建模,以确定不同环境条件下激光雷达的探测极限距离。

四、Panosim仿真测试应用



人-机-环境一体化虚拟仿真测试平台Panosim可以对智能汽车系统进行SIL仿真测试,下面以基于毫米波雷达的ACC控制算法为例,通过Panosim软件对其进行测试。
首先进行Panosim仿真平台毫米波雷达模型初始化配置。
然后,在PanoSim的基础上,通过第三方平台接口,在MATLAB/Simulink平台上搭建ACC实例。橙色框是雷达模型,蓝色框是驾驶员模型,绿色框是ACC控制算法,上方车辆图片是主车车辆动力学模型,下方车辆图片是交通车车辆动力学模型。
最后,进行ACC仿真测试。主车起始位置为5m,初始速度为40km/h,在ACC控制器中设置的巡航速度为55km/h。交通车起始位置为45m,初始速度为30km/h,先匀速运行10s,然后匀加速8s,车速增加到40km/h,再匀减速运动7s,速度恢复为30km/h。试验结果如图8所示,主车跟随交通车行驶,没有发生碰撞,最终当交通车行驶出雷达可探测范围时,主车速度逐渐稳定在ACC控制器设定的巡航车速55km/h(15m/s)。红色框内部分表示交通车辆已经驶出雷达可探测范围,程序中规定当雷达检测不到物体时,将相对距离和相对速度置为-1。
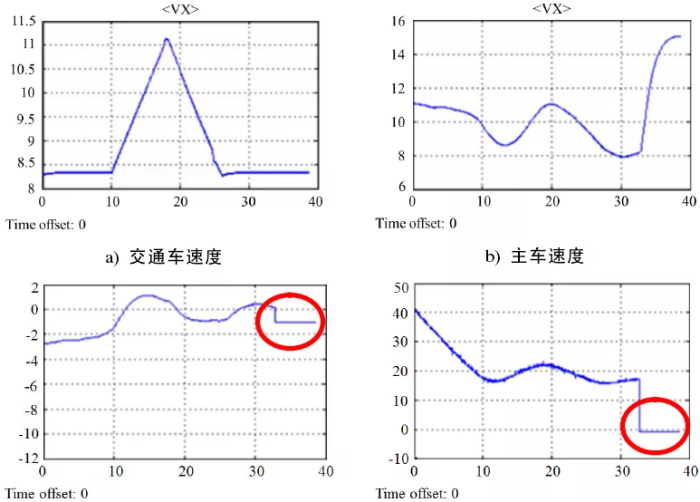
仿真测试结果

五、软件在环虚拟仿真测试技术



作为智能网联汽车测试验证过程中的新技术,软件在环测试仍未形成统一的测试流程,不同机构提出基于统计数据或功能边界的测试手段,当前存在的测试技术包括穷举测试方法、蒙特卡洛测试方法、组合测试方法、加速测试方法等。
穷举测试方法是最基础的软件在环测试方法,即是在一个可能存在可行状态(可行解)的状态全集中依次遍历所有的元素,并判断是否为可行状态。在软件在环测试过程中,首先根据专家经验或智能网联汽车的功能边界,列举出可能遇到的所有逻辑场景,通过给定逻辑场景参数空间边界及离散条件等方式,生成所有可能的具体场景,然后将所有可能的场景依次进行试验,判断被测智能网联汽车算法在所有具体场景中的表现。这种方法可以发现被测算法在所有情况下的表现,对于算法的缺陷可以及时发现,但是穷举法测试效率低,测试成本高,尤其是智能网联汽车测试维度较多,极易发生维度爆炸的现象,无法将所有可能的场景全部进行测试。
组合测试方法通过分析被测车辆与周围车辆的运动关系来生成测试用例,该方法将与被测车辆运动相关的周围十一辆车的位置及运动状态考虑在内,从而分析他们处于何种运动状态时会对被测车辆的运动产生影响。以图2‑30为例,被测车辆本车道前方车辆发生加速或者制动时,会对本车前方的运动空间产生影响,并且当其发生转向时,会有本车的右前或左前位置车辆产生干扰从而影响本车的运动状态,因此需要考虑本车前放车辆的四种运动状态。同理,其他车辆的运动状态也可进行推断,通过这些周围车辆位置和运动状态的组合,即可大量生成相关的测试场景。
蒙特卡洛测试方法是一种统计学的方法,用来模拟大量数据。该方法用于智能网联汽车的测试过程中时,首先需要进行大量的数据收集用以描绘场景可能的概率分布并建立具体场景的概率分布曲线;根据概率分布曲线随机生成海量具体测试用例;统计并分析被测算法在不同具体场景中的测试结果。蒙特卡洛测试方法的好处是其测试结果具有统计意义,可反映被测算法在真实道路情况下的统计学情况,但由于自然驾驶数据中的安全场景占比较大,蒙特卡洛测试方法在生成具体场景的过程中会生成大量的安全场景,这极大的降低了测试效率。
加速测试方法以重要性采样为代表,其针对数据的处理过程分为以下六步:大量收集实际行驶过程中的数据;对数据进行过滤,保留下包含自动驾驶车与人类驾驶的车辆进行有价值的交互的数据;对人类驾驶行为进行建模,以此作为对自动驾驶车产生主要威胁,并且是概率分布的随机变量;减少日常驾驶中的没有发生事故的数据,然后用发生了危险事故的数据进行取代;在加速场景下使用蒙特卡罗的算法,从而能够在人类驾驶员与自动驾驶车之间产生高频率高密度的相互作用;使用统计分析的方式,根据测试的结果去反推,在实际情况中自动驾驶车的表现情况。
加速测试的核心思想是引入一个新的概率密度函数f*(x)代替原本的f(x),增大危险场景的生成概率,从而减少测试次数。在使用随机采样的场景生成方法时,危险场景的概率密度函数为f(x),其最小测试次数为:

式中,γ为危险场景发生的概率;β为给定常数;z与N(0,1)的逆累积分布函数有关。
使用重要性采样进行危险场景生成时,危险场景的概率密度函数为f*(x),其最小测试次数为:
式中,I(x)为危险事件的指标函数;L(x)为使用重要性采样的似然比。
加速测试方法可以极大的的提高测试过程的测试效率,并且由于似然比的引进,其测试结果也可反应真实道路上的统计情况。通过对前车切入、前车制动等典型场景对危险场景强化生成的方法进行验证,证明其测试速度可达到蒙特卡洛测试模拟的7000倍。












![]()
2001-2009 Vogel Industry Media版权所有 京ICP备12020067号-15 京公网安备110102001177号


获取更多评论