“车路协同”是怎么帮助智能汽车的
文章来源:品驾
发布时间:2022-02-25
车路协同是对传统分散式、离线式交通的一次深刻变革,这会大大提升我们的出行效率,更会让驾驶员降低驾驶难度。
自从新能源电动车井喷以后,“智能”两个字格外抢眼,随后就有了智能座舱、智能驾驶的概念。

可大家是否想过,单从汽车终端去聊“智能”,有意义吗?
其实,我们更需要的是智慧出行,是公共道路与车的相互联动,用智慧交通提升出行体验和效率。这才能解决很多用户出行时遇到的痛点,绝不仅仅是解决车的智能化。
-
当你驾车快要经过路口时,突然黄灯闪烁变成了红灯,你猛的刹车,给自己吓一跳,严重者可能造成后车追尾。(这是因为你无法掌握交通灯的实时信息)
-
驾车到空无一人的路口时,遇到红灯的你无奈地等待着红灯,而且红灯时间还不短。等红灯的时间纯属浪费掉了。(这是因为交通灯不智能,倒计时不结合路况)
-
如今的车型很少能帮驾驶员实时规划最优路线,驾驶员高速行驶溜号时,亦或是导航断网时,很容易错过下道口,车辆不能主动带着驾驶员驶出岔道口。(这是因为车辆不具备与道路互联的功能,不能主动帮驾驶员判断,甚至是主动干预变道)
-
有时候驾车疲劳,还没等到可以停车的休息点,在马路中等红灯时就睡着了。这时变绿灯后车辆没提醒你,导致后面车按喇叭吓你一跳,甚至都可能吓出心脏病。(这是因为车辆不能对你进行信号灯变换提醒)
其实,在路上浪费时间、走错道路、红绿灯不智能等等问题,都导致了我们的公共交通不通畅、不安全。即便车辆有再高级的辅助驾驶,但我们在马路上依然没法知道更“全局”的交通信息,只能“走一步看一步”。
如果想做到出行效率最大化,那必须要知道一个概念——“车路协同”。
当智能汽车结合车路协同技术,就会大大提升出行安全性和效率。“车路协同”有点类似让汽车“开天眼”,刚才举例的痛点也全都会被解决。
车路协同是采用先进的无线通信和新一代互联网等技术,全方位实施车车、车路动态实时信息交互,并在全时空动态交通信息采集与融合的基础上,开展车辆主动安全控制和道路协同管理,充分实现人、车、路的有效协同,保证交通安全,提高通行效率,从而形成的安全、高效和环保的道路交通系统。

车路协同是将车与车、车与路的信息相连通。车可以将拥堵信息、实时路况等,传给交通控制中心;交通控制中心又可以将实时更新的信号灯数据、车流量信息、绿波信号、事故信息等,传给路上行驶的汽车。
车与车、车与路之间的实时通讯,就可以尽量避免拥堵,尽量减少驾驶员急刹车等危险操作。只要合理控制行驶路线及速度,就能实现出行效率和安全的双重保障。
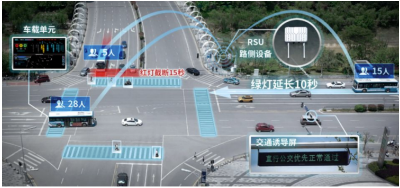
再举个例子:如果你驾车通过多个红绿灯路口,你一定希望预判到前方红绿灯的倒计时,同时,能够尽量赶上绿灯驶过最好。
车路协同出现以后,你的车辆能够显示前方路口信号灯颜色与倒计时。同时,车路协同也会尽量提供给你绿波信号,让你了解一路绿灯大概需要什么样的车速。
不过,要做到车路协同可不容易。并且这有着复杂的技术架构。这需要公用通信网络的C-V2X车联网区域应用云系统中各个字系统以及与其他外部网元件见的交互。
参考《国家车联网产业标准体系建设指南(信息通信)》,我们可以将C-V2X车联网区域应用云用下图来直观解释:

当有了如此复杂的技术架构,再结合路侧协同基站,则可形成从车端感知上报,到路侧协同基站,到边缘云,再到区域云的一系列信息传递。之后,我们的车辆又会得到云信息的传递,就能形成智能交通的合理闭环。
二、、车路协同如今实现了么?
车路协同概念的提出已超过十年,2011年,清华大学牵头的科研团队在国家863计划的支持下,围绕车路协同关键技术开展了系统性的探索和研究。

2014年10月,在青岛举行的智能交通系统国际会议(ITSC-2014)上,相关研究人员演示了9个场景下的人、车、路协同。
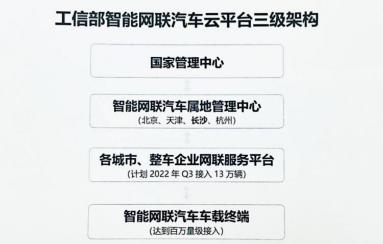
2016年,国家推出一系列政策支持车路协同发展。工信部也建立了智能网联汽车云平台架构,该架构是智慧城市的基础支柱之一。
在智能网联汽车架构中,国家管理中心统一监管旗下“智能网联汽车属地管理中心”,这其中包括长沙、北京、杭州等城市,未来会有更多。

这些“中心”再与车企合作,通过车载终端与智能网联运控平台之间实时交换数据,来实现车与车、车与路的互通,来实现车路协同。

如今,车路协同在中国的部分城市的部分道路上已经实现,并且有福特等汽车品牌推出了可以实现车路协同功能的车型,来提升驾驶员的出行体验。
之所以还没有全面实现车路协同,是因为这不仅与车辆是否搭载该功能有关,更重要的是,地方交通是否已经实现了硬件条件的满足,是否红绿灯可以上传实时信息,道路监控是否可以提供实时数据,该城市是否有智能网联汽车属地管理中心等等。

以车路协同示范城市长沙为例,这里已经在100公里高速路布局V2X点位151个,在城市开放道路布局V2X点位177个,这些正是实现车路协同的必要条件。开着具有车路协同功能的车辆,就能在长沙这些路段实现车路协同功能。
在前不久,品玩/品驾受福特邀请参与体验福特EVOS车路协同功能。

在有红绿灯的路段,车辆不仅可以显示前方红绿灯的倒计时,而且等红灯时,车辆还会有变灯声音提醒,生怕你睡着了。
此前品玩/品驾曾在北京亦庄体验的百度“萝卜快跑”自动驾驶汽车,也采用了“车路协同”技术,自动驾驶汽车可以预知前方十字路口的交通信号灯状态,提前决定是否采取加速,还是制动的操作。

从功能上,车路协同配合车载高精度地图导航,可以主动帮你提醒是否变道进入出口,还能提供给你最适合绿波行驶的速度等。
有了车路协同功能,你会对交通路况更加了解,你不再像没头苍蝇一样行驶在未知的马路上。这种体验不仅减轻了我们的驾驶压力,也确实会一定程度上缓解交通压力。
车路协同是对传统分散式、离线式交通的一次深刻变革,这会大大提升我们的出行效率,更会让驾驶员降低驾驶难度。
不过,车路协同涉及到公共交通设施的硬件升级,涉及到技术改造和产业链条的更新,这是交通设施和车辆持续性迭代的过程,是一个硕大的社会工程。

当新能源汽车盛行之时,我们对智能的理解还不到位。辅助驾驶的增加、车机与车内人员的沟通还远远不够,我们的终极目标应该是实现智慧交通,而绝非汽车这一终端的智能化。
随着越来越多的城市硬件升级,加入到车路协同行列之中,也随着“萝卜快跑”、福特一样的出行/汽车品牌开始实现车路协同功能,我们似乎可以遇见更通畅的交通,更安全的驾驶方式等等。真的希望未来的交通,因为车路协同而更美好。














获取更多评论