优化被动无匙门禁系统的性能
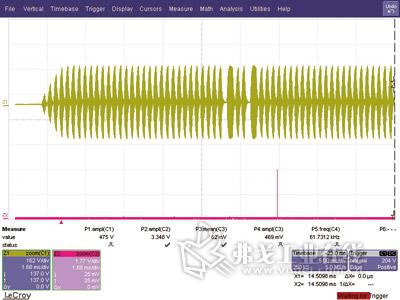
图1 LF前同步码和器件唤醒
准确和精确地获取被动无匙门禁(PKE)系统定位信息的过程并非是微不足道的工作,其中的解决方案之一就是爱特梅尔公司的ATA5790器件,它是包括完整的用于PEG密匙的LF功能的嵌入式AVR微控制器。
被动无匙门禁系统概述
配备PKE系统的汽车让消费者无需使用机械钥匙或按动手持式密匙的按钮,便可以开启上了锁的车门。
PKE系统有两个主要部件:密匙和基站。密匙通常放置在车主或驾驶者的钱包或口袋里,而基站则安装在汽车上,包含有生成环绕在汽车周围,通常为125 kHz低频(LF)磁场的装置,同时基站接收通常为315 MHz或433.92 MHz的射频(RF)信号。这种基本系统不断演进,逐渐加入更多特性,如无匙发动机起动、无匙门锁和接近照明等,而基本的系统技术并没有改变。
实现PKE的主要技术是:LF磁场的产生和测量以及RF无线电传输和接收。简言之,当PKE系统因某一事件如拉起车门把手而触发,汽车基站便会产生LF磁场。配有测量3维(X、Y和Z轴向)磁场强度方法的密匙,捕获此信息并通过RF信号传送回汽车基站。如果确定该密匙“属于”此车并处于汽车附近的适当位置,基站就会打开车门。显然,该系统的正确运行取决于关键参数。
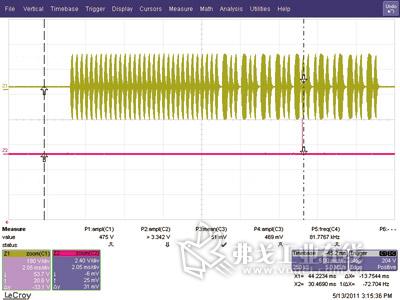
图2 带有有效负载数据信号的LF前同步码(接收2字节)
1. 通信协议
PKE系统的通信跨越两个频域:LF和RF。在每个频域内都存在一个包含某些基本磁场信号的通信协议。在LF频域内,基站必须发送足够稳健的数据模式以便区分有效通信和噪声。它还应对授权密匙如何回应给出次序,每辆车可以有多达8个编号,授权密匙通过发送RF信息来避免冲突。最后,基站需要为密匙发送一段时间的持续和恒定的LF磁场,来获得磁场强度的准确测量。在RF频域,密匙必须安全地与汽车基站通信,通过所需的信息来确定是否可以打开汽车。通常,LF频域使用二进制或矩形脉冲宽度调制,以3.9 KB/s的波特率进行通信,而RF频域通信使用开关或频移键控调制,传输速率为4~20 KB/s。
2. LF唤醒
为了将错误唤醒减至最少并延长密匙的电池寿命,我们需要一个从基站到密匙的预定义数据模式。该模式被称为“前同步码”,通常包含连续的数据位串。连续的数据位串必须足够长,以便实现密匙的初始化及核实有效数据位时序是否存在。如果时序核对通过,为采集剩余信息,使用同步位来调准数据接收缓冲区。由于前同步码串中的连续位的数目增加,因此降低了杂散磁场唤醒的可能性。图1和图2显示了数种典型的LF磁场调制模式。
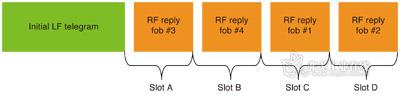
图3 时隙防冲突方法
3. 防冲突方法
在从汽车基站发送到密匙的LF信息中包含了一项关键信息:一条规定密匙响应次序的规则。如果没有该信息,与汽车配对的所有密匙都很可能同时回应,并毁掉全部的RF响应。解决此问题的通用方法就是时隙防冲突协议。这包含了分配特定的密匙到特定的时隙,在此期间它们被允许回应(见图3)。例如,假设汽车与4个密匙配对,而每一个密匙都分配了数值范围从1~4的独一无二的识别数字。分配到特定时隙的独特密匙识别数字在初始的LF信息中就已经被预先定义了。
4. RSSI测量
对于从汽车基站发送的LF信息,剩下的关键问题是测量X、Y和Z轴的磁场强度。通常在LF磁场处于连续波(CW)模式时进行测量并完成。PKE系统在此方面要考虑的重要参数为灵敏度、准确性和转换时间。
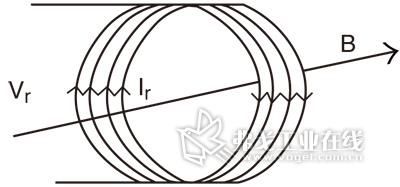
图4 磁场的形成
灵敏度可以具有几种含意,取决于实际应用场合。有时它指的是唤醒LF检测电路所需的最小可检测电压幅度。在其他时候,它是可以被检测和转换为数字值的最小电压幅度。上述两种情形中,典型的度量单位为mV,并且可以被规定为峰峰值(VP-P),均方根值(VRMS)或峰值电压(VP)。它们数学上的相关性如下:
VP = 0.5×VP-P=2×VRMS
准确性指的是在模数(A/D)转换期间引入的误差。误差的主要来源为A/D基准电压、位分辨率和接收天线谐振频率的变化。在设计时,电子组件如何对误差进行补偿的设计是很重要的。根据不同的解决方案,补偿会使A/D转换过程更加复杂性和耗时。
转换时间是校准、转换和补偿模拟电压所需的时间,该模拟电压出现在三维接收天线的每个轴向上,天线包含在密匙内。重要的是在设计定型之前,要考虑是采用对三维天线3个轴向依次进行A/D转换的设计,还是采用对三维天线3个轴向进行的同时并行A/D转换的设计,这取决于所选设计方案的架构。IC供应商的校准和补偿技术的差别很大,必须仔细研究,以便了解其对PKE系统重要的转换时间的影响。
磁场基础
要PKE系统正确运作的基本要求是能够在汽车周围不断产生已知及具有足够强度的磁场,并且可以准确测量。本节将集中讨论PKE系统的这个方面并讨论影响系统性能的LF磁场参数。
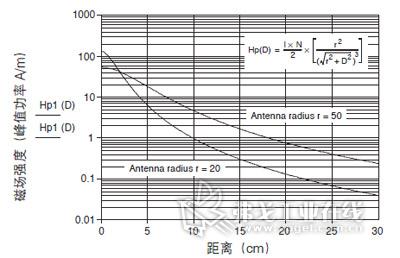
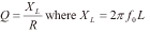
图5 磁场强度对比距离
1. 磁场的产生
如图4,磁场B为当电流流过线圈时产生的磁场,磁场在线圈的中心集中,并且沿着轴向传播,通常相对于由线圈横截面形成的平面,磁场从线圈的一端环绕到另一端。磁场的幅值通过磁通量来量化。在自由空间,依据电流大小和线圈几何形状,磁通量的分布是可预知的。然而,当在磁场中放置铁磁物体,磁通量模型就会变形,所以在评估补偿技术时需考虑这一点。
图5显示了两个不同线圈所产生的磁场强度随距离的变化,每个线圈具有不同的半径。值得指出的是,磁场强度与线圈匝数和电流大小成比例。显然,从图表的纵坐标使用的对数比例来看,当离线圈中心的距离D增加时,磁场强度趋向于以指数比例衰减:1/D3。这是个很好的特性,可以限制PKE系统的实际工作范围不超过5m。当考虑与某些补偿方法有关的数学复杂性时,这也是另一个重要的因素。
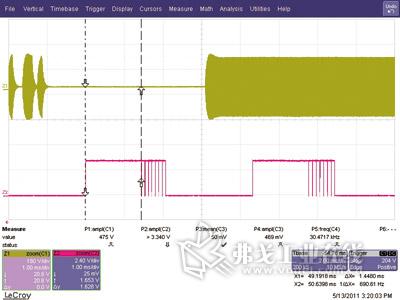
图6 内部和外部A/D转换测量
2. 谐振
车载线圈(产生LF磁场)和便携密匙线圈(测量LF磁场)这两者都必须调谐到在相同频率上谐振以优化系统性能。谐振出现在线圈的复数阻抗为零时的假想条件下。这也是电容性和电感性电抗变得相等并相互抵消时的频率。
谐振电路的谐振频率由公式定义:
因为线圈具有固有的电感,必须引入电容器件来达到谐振。可以通过并联或串联来获得谐振。实际上,车载线圈中的谐振是通过增加一个串联的电容器来获得的,从而使线圈电流最大,同时在密匙天线中采用并联电容以使其感应电压最大。
3. 品质因数Q
线圈质量的常用指标为品质因数Q。此因数既影响系统波特率;也影响测量线圈中的感应电压大小。品质因数Q定义为电感器感抗与它的直流(DC)电阻的比值,由以下公式描述:
理论上,较大的Q值会在测量线圈上产生较大的感应电压和较好的性能。然而,这样对数据速率有负面影响。实际上,常使用的品质因数Q为15,这个典型值是在这些限制因素间的一个合理平衡。两个具有类似的品质因数Q的磁场产生线圈和磁场测量线圈,可以产生最佳的系统性能。
图7 对数和线性A/D值对比距离
4. 磁场强度测量
磁场强度是通过在磁场中置入天线线圈来测量的,在测量线圈中产生的感应电压是其线圈的物理性质(先前讨论的机械和电气特性)的函数且与磁通量成角度调整关系。当磁场产生线圈和磁场测量线圈具有相同的轴向时,与角度调整相关的感应电压分量可达到最大值。当两个线圈轴线正交时则不会产生任何感应电压。其关系可以简单地进行模拟,如以下公式所示:
Vinduced = Vmax cosθ
这里,θ为线圈轴线间的角度。
在PKE系统中,密匙方向是不受控制的,需要使用三个测量线圈来评定它在自由空间的位置;每个线圈对应一个轴向X、Y和Z。
定位测量中的实际考虑
PKE系统中的首要目标为准确和迅速确定手持式密匙相对于汽车的位置。外部因素如温度、磁场失真、谐振电路器件老化效应和初始公差,都会影响系统准确测量密匙位置的能力。其他系统内在的属性,比如灵敏度、A/D转换曲线(对数对比线性),以及A/D分辨率也会给测量过程带来误差项,并增加测量补偿的复杂性。当考虑替代设计方法时,了解这些误差来源、可用的补偿技术,并考虑它们对整体系统响应时间的影响是很重要的。
为了说明LF磁场强度测量误差补偿技术的基本概念,本文将通过Atmel ATA5790器件来介绍,它是一个完全集成(不包括谐振线圈电路)的PKE系统解决方案。
1. 谐振频率微调
只有当磁场产生线圈和测量线圈调整到在相同频率上谐振时,才可能达到最优性能。在设计时依据测量线圈的标称电感,然后选用数值适当的谐振电容器,可以完成上述优化。然而,在线圈和电容中,部件至部件的容差变化总会导致性能低于平均水平。为了进行补偿,能够微调谐振频率回到标称值的设计是具有吸引力的一种设计。ATA5790具有这项能力,通过集成可变电容阵列,对每一个3D测量线圈输入以并联方式来配置,可以从0~120pF进行调整。
在实践中,这种补偿形式在汽车密匙生产制造时进行一次。通过下线测试仪,相对于一个控制良好的恒定磁场,控制测量线圈的位置并校准,每一个轴向和每一个密匙的部件至部件的分量变化,都可以单独被量化及修整,而每一个可变电容阵列的修整值都将被保存在非易失性存储器中,在产品的整个生命周期内使用。
2. 自适应环境补偿
在设计稳健的PKE系统时另一组要考虑的因素,是那些受环境变化影响且可能引起不可预知特性的因素,它们会对测量精度带来负面影响。这些因素可能是温度、L/C组件老化、局部加载/测量线圈的失谐或任何其他降低测量线圈响应特性的因素。在这方面,性能退化与线圈至线圈的耦合减弱有关,这会导致密匙天线上接收的信号电压降低,而且同时在密匙定位测量期间读取较低的RSSI值。为了补偿此类影响,在受控环境条件下来自预定义信号的响应,Vin factory必须被测量,并且与经受未知环境条件且来自相同预定义信号的响应Vin service相比较。通过比较,可量化已经发生的环境退化数值,并将此偏移值Vcompensation施加到随后汽车线圈产生磁场的测量中。
为使此方法有效,必须具有数项设计特性:内部参考信号;将它应用到接收天线线圈的方法;在LF磁场产生过程中实施测量的可预知间隙。ATA5790在单一封装中集成了这些特性中的前两个。结合LF通信协议规格来实现特性3),ATA5790便能够实现这种自适应环境补偿技术。
有一个例子可以很好地说明这项技术。在密匙制造期间,在进行在线测试时,对ATA5790进行谐振频率修整,且参数永久地保存,修正时,密匙周围的磁场将很好地受控并摆脱任何形式的寄生负载或影响。下一步,ATA5790起动了自测试程序,连接测量线圈与内部产生的激励信号,所有输 入线圈的响应电压均被同时测量。来自每个线圈的测量结果,VX-internalfactory、VY-internalfactory和VZ-internalfactory被储存在非易失性存储器中,在密匙的整个寿命周期内使用。制造过程完成后,将密匙付运给客户并交付使用。
当在使用中及处于外部LF磁场中已知的间隙期间,在线测试期间所使用的内部产生的相同激励信号出现在测量线圈中。测量来自每个线圈的响应电压VX-internalservice、VY-internalfservice和VY-internalservice,并减去制造期间获得的数值,以确定每一轴向所需的补偿额。下一步,进行由汽车产生的外部LF磁场的测量VX-externalservicey、VY-externalservice和VY-externalservice。通过对每一个轴向增加相应的补偿值,可以更准确地评测密匙在空间中的定位。总之,每一轴向的补偿公式如下所示:

3. 磁场强度测量平均值
对A/D测量值取平均值,滤除了瞬变情形并提高了定位信息的可重复性。当此原理应用于PKE系统时,能够增强LF磁场强度测量过程的完整性,并且能更准确地评估密匙的空间定位。在实施这样的算法时,重要的是需要考虑对响应时间的影响,比如:(1)对X、Y和Z轴向进行同步采样或顺续采样;(2)对每一轴向的采样次数;(3)A/D转换时间。
在上述提到的类别(1)和(2)中,ATA5790为设计人员提供了超越其他解决方案的优势。该器件采用了并行转换架构,同时实现了X、Y和Z轴线的A/D转换。更进一步,初始转换发生后,通常在大约1.5 ms后,可以实现每48us刷新一次;提供如此快速的刷新,可以实施包含了8个连续AD采样值的均值算法,并且带来的影响最小。
图6是一个来自示波器的屏幕截图,显示了A/D采样,以及外部与内部两个磁场强度的均值测量运算。红色迹线显示了在LF磁场中的A/D采样操作,第一个连续8次的A/D采样运算发生在最初的空隙,包含8个连续A/D转换和均值运算,然后第二个连续8次A/D采样运算发生在连续的LF磁场发送期间,如绿色迹线所示。要注意的是,初始的A/D转换时间大约为1.5 ms,而在此之后,跟着7个额外转换,每个大约为85ms。在这个例子中,软件开销(包含均值计算和保持)在最快48ms的刷新率上增加了额外的时间。
4. A/D转换器的架构
在PKE系统内,A/D转换器的架构在位置精度方面具有重要的意义。当考虑模拟线圈电压和距离间关系的曲线时,可以直观地看到带有对数传递函数的A/D转换器将产生更好的结果。
实际上,选择此方法有着坚实的基本原理。即,相比采用线性传递函数的A/D转换器,当使用对数A/D转换传递函数来调节接收线圈上的电压,可以在更大距离上接收信号,也就是每个A/D转换步骤具有更好的距离精度。
图7把线性和对数A/D响应相叠加,每个A/D具有8位分辨率。值得注意的是,线性A/D响应在近场区(< 50 cm)使用了其0~255的可用转换范围中的大多数(240步),对于远场区留下很少(16步);另一方面,对数A/D响应在0~255的可用转换范围内的分布更均匀,可遍布整个距离测量范围。因此,相比采用线性A/D响应,对数A/D响应具有出色的定位精度,有可能达到更大的距离范围。












![]()
2001-2009 Vogel Industry Media版权所有 京ICP备12020067号-15 京公网安备110102001177号


获取更多评论