车体静态强度检测系统双模式控制技术研究
车体侧翻事故频发,而车体设计不断轻量化的今天,车体强度的检测就显得尤为重要。针对目前车体强度检测设备技术落后、试验项目受限的现状,本文给出了一种双模式控制技术的核心控制方案,利用该控制技术研发了多功能车体强度检测系统,进行了性能测试试验并对试验测试曲线进行了分析。
轿车车体强度作为车辆安全性能一个非常重要的方面,一直倍受重视,因为每年有不少人死于轿车翻滚事故。轿车翻滚事故作为轿车事故的主要表现形式之一,所导致的伤亡率远高于其他形式的道路交通事故。轿车滚翻时车体承受冲击载荷作用,若强度不够则会发生大变形并侵入乘客室,易对乘员造成伤害。
如何在轿车车体设计不断轻量化的趋势下保证车体有足够的强度抵抗变形,从而降低轿车在翻滚事故中伤亡率,开始受到人们越来越多的关注,车体强度的检测也越来越受重视。
基于现有车体强度检测设备存在的技术落后、操作繁杂、控制精度低、测试方式单一、结果误差偏大等为题,本文针对相关国家标准研究并研发出了适用于轿车车顶、侧门等强度检测的多功能轿车车体强度检测系统,并对该系统采用的双模式控制技术及系统性能进行了分析。
技术要求分析
经过对GB 26134-2010《乘用车顶部抗压强度》、FMVSS 216《轿车车顶抗压强度》、GB 26512-2011《商用车驾驶室成员保护》、NHTSA_216A《Roof Crush Resistance》、GB 15743-1995《轿车侧门强度》及FMVSS-214《侧面碰撞保护》等国内外不同标准要求的分析,以及对部分汽车厂家或汽车检测中心实际试验方法的调查,按照过程控制方式大致可以将相关试验概括为以下两种类型。
第一种是对目标载荷量要求精确,要求检测最大形变量,同时对加载速度及加载时间有一定限制。针对该类型试验,可以用载荷闭环控制的方式,通过硬件电路PID运算,实现较高控制精度,同时可以对当前加载速度的采集及判断,实现对最大速度的限制。
第二种是对目标形变量要求精确,要求检测最大载荷量,同时对最大载荷量及加载时间有一定限制;或是对加载速度(单位时间内的位移变化量)要求精确,直到达到目标载荷量或位移量时停止加载。针对该类型试验,可以使伺服系统工作于位置模式,用运动控制卡对伺服电动机进行脉冲控制,实现高精度匀速加载。
另外,由于不同试验类型对车体侵入角度及高度要求不同,需要加载装置分别沿纵轴及横轴方向倾角可调(沿纵轴0~5°可调,沿横轴0~90°可调),并可垂直升降。加载过程须有较高的速度稳定性,及较高的加载精度。
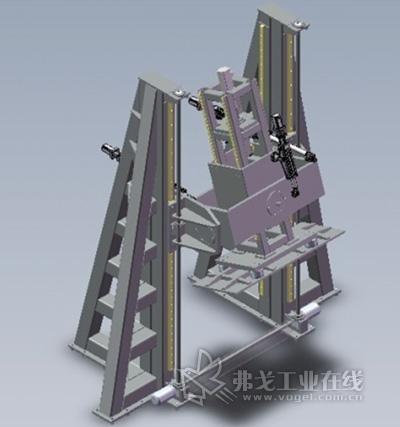
图1 机械台架结构图
关键技术控制方案
1.倾角调节
倾角调节分为手动调节模式和自动模式。
手动模式使用手摇脉冲发生器(以下简称“手脉”)控制伺服系统及电动缸实现,通过设置伺服驱动器参数可以实现手脉三档调速,使用中实时改变手摇快慢,可以实现全范围(对应于伺服电动机零转速到额定转速)速度的倾角调节,而且可通过切换不同通道伺服驱动器的相应IO接口电平来实现对不同通道的控制,从而实现相应的倾角调节。同时对旋转编码器输出脉冲进行计数,并换算为实时倾角值。
自动调节模式由上位机给出脉冲指令,通过运动控制板卡控制伺服电动机,并驱动电动缸实现,由旋转编码器计数并换算当前倾角值,并作为反馈值,形成倾角闭环控制。自动调节过程中,为了防止由环境干扰(如电磁干扰等)引起的旋转编码器脉冲读数跳变,选用绝对式旋转编码器测量倾角值。
2.试验准备
根据相关标准的试验要求,加载装置下表面与车体刚好接触时为试验起始点。本方案中可以通过自动方式结合手动方式完成对加载装置下表面与车体刚好接触前空行程的处理。
手动方式是将加载通道伺服驱动器运行模式切换到位置模式,使用手脉进行手动调节加载装置与车体相对距离,通过设置加载通道的伺服驱动器参数可以实现手脉三档调速,使用中实时改变手摇快慢,可以实现全范围(对应于伺服电动机零转速到额定转速)改变调节速度。适用于加载装置下表面与车体之间空行程较小且对车体变形量测量精度较高的情形。
自动方式即通过计算机发送脉冲指令按设定速度匀速移动加载装置,使加载装置下表面接近车体,适用于空行程较大的情形。
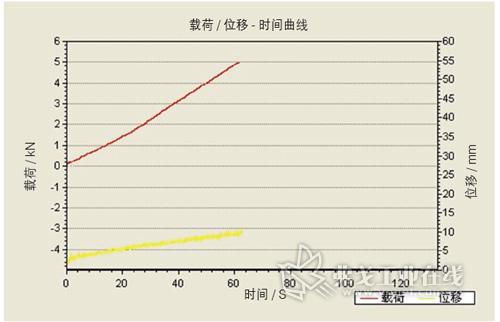
图2 模拟车顶静压测试数据曲线
3.加载过程
标准技术要求且可以广泛适用于不同类型试验,本方案给出了两种加载控制方式,可以根据试验需要自由选择加载方式。
(1)对于目标载荷量要求精确,要求检测最大形变量,同时对加载速度及加载时间有一定限制的情况,可以采用了载荷闭环控制,即按单位时间等载荷量递增方式进行加载:
F(n)=F(n-1)+f(n)×ΔT
其中,F(n)为当前载荷输出值,经DA运算转化为电压值输出;F(n-1)为上一采样周期载荷输出值;f(n)为当前采样周期对应的单位时间载荷输出值;ΔT为采样周期。
然后,通过单位时间电动机脉冲增量计算当前加载装置移动速度,若当前加载速度大于加载速度限制值(≤13 mm/s)时,输出载荷量不再进行递增,为当前系统按照限制速度F(n)=F(n-1)进行加载。当达到给定载荷量或最大形变量时,试验自动结束,并复位到加载起始点。加载过程既保证了试验时间,也限制了加载速度,有效避免因被测车体突然形变而造成的冲击。在该加载方式下,载荷闭环是通过上位机载荷给定与载荷传感器反馈值相比较,再经过硬件电路的PID运算后输出至伺服系统来实现的,伺服系统运行于速度控制模式,接受模拟电压(-10V~+10V)输入。
(2)对于目标形变量要求精确,要求检测最大载荷量,同时对最大载荷量及加载时间有一定限制,或是对加载速度(单位时间内的位移变化量)要求精确,直到达到目标载荷量或位移量时停止加载的情况,可以将伺服系统切换为位置控制模式,按单位时间等脉冲量输出方式进行加载,同时不断采集当前载荷值及当前形变量(通过电动机编码器读取)。
当达载荷达到载荷限定值或当前形变量达到给定值时,试验自动结束,并复位到加载起始点。在该加载方式下,伺服系统运行于位置控制模式,只接受脉冲输入,伺服系统的高精度保证了加载速度的平稳性。
需要说明的是,在位置控制模式与速度控制模式相互切换以及手动模式与自动模式相互切换过程中,需要确保伺服电动机目标控制模式的初始指令为零,以防止因电动机冲击造成的硬件损坏或人员伤亡。
检测系统组成
根据上述方案研制了车顶强度检测系统(其机械台架见图1)。作动器在反力支架上的上下移动是通过由联轴器连接的两个三相异步电动机及减速机驱动丝杠转动实现的,移动范围较大,适用于不同高度轿车车型。
系统使用伺服系统带动丝杠转动实现试验加载,用一套伺服系统驱动电动缸完成α倾角;由两套伺服系统同时驱动两个电动缸共同完成β倾角调节,控制过程中两个通道执行相同板卡输出指令,加入软件速差保护功能,防止由运行速度不同而导致的其中一个通道过载报警。
与液压方式相比,伺服系统控制方式灵活、精度较高,便于实现本方案提出的双模式控制技术。加载通道使用了自主研发的PID伺服控制卡控制伺服系统,具备硬件过载保护功能。
使用四个载荷传感器进行载荷检测,在横向和纵向上分别对称地安装在加载板上,这样可以有效防止偏载对传感器的损坏。经运算电路对四个传感器采集电压值求和后,作为有效载荷值,用于判断及控制。同时使用位移传感器进行车体形变量检测,试验时实时采集并计算载荷量及车体形变量,并绘制载荷及形变量实时曲线。数据采集过程中,为了采样值偏差,需要进行滤波处理。先将每次采样到的新数据先进行限幅处理,再对数据进行递推平均滤波处理,以获得新的滤波结果。滤波可有效抑制干扰,减小误差。
使用绝对型编码器进行角度检测。绝对型编码器具有位置惟一(即绝对的)、掉电位置不丢失、抗干扰能力强和错码几率较小等优点,其传输及计算的数据的可靠性很高,可很好用于长期定位控制。使用分辨率为3000 PPR旋转编码器测量加载装置倾角值时,角度分辨率为0.12°。
本方案采用研华工控机及数据板卡进行测控,数据输入输出采用多点差值进行标定,有效地防止了信号非线性导致的控制偏差,软件中进行了自动零点漂移误差补偿,试验过程以实时采集的传感器反馈值为准,避免了因传感器零漂导致的控制误差,使测量精度保证在0.5%以上。
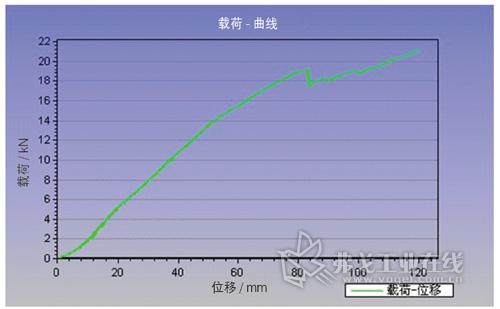
图3 模拟侧门强度测试数据曲线
性能测试
为了验证该测试系统,进行了不同加载方式的性能测试,被测装置为白车身。图2为模拟车顶静压测试数据曲线,测试参数设置如下:系统按照100N/s加载,加载过程移动速度不超过2mm/s,加载到目标载荷5kN后以200N/s的速度卸载。图3为模拟侧门强度测试数据曲线,测试参数设置如下:系统按照2mm/s匀速加载,初始耐压位移40mm,中间耐压位移80mm,最大耐压位移120mm,加载完成后以4mm/s匀速卸载。
试验前先将加载板倾角调整至试验要求的角度。使用手脉调整加载头到刚好接触车顶表面后开始加载。加载过程中有相应硬件和软件的过载报警及保护。硬件电路产生报警后,控制电路电压输出只能减小,并报警指示;软件报警后有报警指示,同时软件自动关闭伺服使能和并使伺服电动机处于制动状态,然后可选择手动缩回加载装置。
由两个试验曲线可以看出,系统控制精度较高,优于0.3%,加载过程稳定,有效地防止了突然形变导致的冲击。由于采用了手脉实时对加载装置的位置进行数字调节,很大程度上减小了测试结果的误差。测试系统性能及功能要优于国家标准的要求,试验效果良好。
另外,该系统在软件方面参数设置灵活,硬件上适应性强,可以完成其他拓展试验。
结论
试验证明,利用双模式控制技术的核心控制方案研发的多功能车体强度检测系统控制精度较高,试验方式灵活,适用范围较广。
经过企业现场应用,采用本文所述控制技术开发的车顶强度检测系统具备较高的易操作性和稳定性,控制精度较高,可扩展性强。该控制方案可以广泛推广到各种轿车强度检测系统中,对于提高轿车性能保障人身安全、提高当前轿车车体强度检测设备技术水平及节约试验成本等方面具有重要意义。












![]()
2001-2009 Vogel Industry Media版权所有 京ICP备12020067号-15 京公网安备110102001177号


获取更多评论