5G 推动自动驾驶技术快速发展
5G技术概括
5G技术将面向未来几类关键应用场景:一是超高速场景,为未来移动宽带用户提供极速数据网络接入;二是支持大规模人群,为高人群密度地区或场合提供高质量移动宽带体验;三是随时随地最佳体验,确保用户在移动状态仍享有高质量服务;四是超可靠的实时连接,确保新应用和用户实例在时延和可靠性方面符合严格的标准;五是无处不在的物物通信,确保高效处理多样化的大量设备通信,包括机器类设备和传感器等。车联网和自动驾驶就是5G技术关键应用之一。
2013年2月,工信部、发改委和科技部共同支持产业界成立了IMT-2020(5G)推进组,协同开展5G研发和国际合作。2016年1月,由国内外企业参加的中国5G技术研发试验正式启动,这是我国首次与国际标准组织同步启动对新一代移动通信技术测试和验证,将有力推动5G标准形成和完善。目前我国IMT-2020 5G推进组组织的“中国5G技术研发试验”正在有序开展,将在3.4~3.6GHz频段进行5G试验。
2017年2月底,在巴塞罗那世界移动大会期间,多家企业集体支持加速5G NR 标准化进度,提议于2017年12月完成5G NRNSA标准,这比原计划(2018年6月)提前了半年。NSA标准机构是沿用4G核心网(EPC),以4G作为控制面的锚点,采用LTE 与 5G NR双连接的方式,利用现有的LTE网络部署5G,以满足领先运营商快速实现5G覆盖的需求。而3GPP 5G SA的标准规范正在加紧推进中,核心标准部分有望在2018年底或2019年初进行冻结。
2017年11月27日至12月1日,3GPP在美国里诺举行分组大会期间,3GPP R15 NSA(5G NR非独立组网)核心标准部分已冻结。5G NR构架演进(图1)分为:NSA(非独立组网)和SA(独立组网)。

图 1 5G NR 构架演进
2018年5月,在韩国釜山召开了GPP工作组会议上,完成5G第一阶段R15的标准研讨并最终确定5G商用的相关标准技术,包括三星、高通在内的芯片、手机和设备商等1 500个标准专家以及Verizon、AT&T、NTT DoCoMo、KT和SK Telecom等主要移动运营商参加本次5G标准讨论。
关于5G频谱,早在2015年世界无线电大会(WRC-15)上就开始研讨5G频谱资源,也是此次大会的主要议题之一,随后各国紧锣密鼓开始5G频谱的研究。业界存在两种观点,一种观点是采用从LTE演进到5G的技术路线,因此认为低频端可以采用LTE技术而非NR,而依托大带宽和低时延的业务应用采用5G高频段。另一种观点是完全采用5G NR技术建网,即低频段和高频段组合使用提供一张5G NR网络满足eMBB、mMTC和uRLLC的多种行业应用需求。
针对车联网Sidelink频谱规划,全球各个国家均已启动相应研究和规划,美国、欧洲和日本陆续发布了相关商用频谱,中国在2016年也发布了针对V2X的5.9 GHz测试频谱并启动相应的测试验证工作。
5G针对自动驾驶技术发展提供的关键技术
根据业界共识,自动驾驶基本分成五个阶段,第一阶段主要是车辆配备信息提示相关功能,比如导航和胎压监测等;第二阶段是结合辅助驾驶技术的传统主动安全功能和Telematics功能,比如车身稳定系统、防抱死系统、自动紧急制动和牵引力控制系统等;第三阶段是辅助式自动驾驶功能,比如自动泊车、车速保持和跟随、辅助转向和预警等;第四阶段是特定场景的自动驾驶功能,比如封闭园区的自动驾驶和高密度的Platooning等场景;第五阶段是完全自动驾驶功能,包括全天候和全路况下的自动驾驶场景。
自动驾驶解决方案基本可以分成自主式自动驾驶(ADAS)和网联式自动驾驶(V2X)解决方案,其中自主式自动驾驶采用单车解决方案,实现从环境感知、数据融合、决策计算及车辆控制几个关键自动驾驶功能的探索,经过多年的研究和产品开发基本形成了以Tesla、Google和欧美部分车企等为代表的技术路线,从L2逐步发展向L3阶段。网联式自动驾驶解决方案基于网联技术提供V2V、V2I、V2N和V2P等多方信息交换形成广域环境感知、低时延高可靠性数据交互和融合来实现各种场景下的自动驾驶需求,比如融合红绿灯信息的城区自动驾驶场景、远程驾驶和车路协同式自动驾驶等应用场景。在通往L4特定道路场景的自动驾驶和L5全路况全天候自动驾驶的技术路线上,自主式自动驾驶与网联式自动驾驶技术融合成为趋势(图2)。

图 2 自主式自动驾驶与网联式自动驾驶相融合成为发展趋势
在环境感知层面,通过车载传感器和网联技术获取到丰富的车辆环境数据。目前自动驾驶的车载传感器主要包括摄像头(长距摄像头、环绕摄像头和立体摄像头)和雷达(超声波雷达、毫米波雷达和激光雷达)等,这些车载传感器的探测距离一般在10 cm~250 m 之间,一些高性能毫米波雷达或激光雷达探测距离能达到300 m,基本满足汽车在行驶过程中环境感知需求,但依然存在局限性,比如针对非视距NLOS场景、恶劣环境场景(比如暴风雪、密集城区等)的环境感知无法通过车载传感器进行有效识别,需要借助V2X网联技术,比如车辆与路边基础设施(交通信号机/路侧摄像头等)V2I通信,比如车辆与云端服务器(车联网管理平台/道路交通管理平台)V2N通信,比如基于蜂窝网络的车辆之间长距离通信V2I2V等方式来完善车辆面对全天候全路况的环境感知识别能力。
5G可以提供巨大容量车辆接入能力(100万终端/km2)和车辆高速移动性(500 km/h)的良好网络特性,大大增强自动驾驶中环境感知能力。
在决策计算层面,基于自主式自动驾驶解决方案是依靠车载ADAS模块完成对感知数据的处理和决策计算,或者结合因果推理AI决策机制算法进行融合计算,最终生成车辆的执行指令。通过测试验证可以发现,自主式自动驾驶通过单车感知数据进行决策计算存在一定局限性,比如车辆密集的城区场景需要车路数据协同,来给出更为精确的决策计算结果。因此,如果能充分运用5G+Cloud架构,将决策层进行分层云化,既可以丰富环境感知数据量,又可以快速生成决策结果,比如AI云化解决方案可以为自动驾驶车辆提供车辆自身AI决策计算,同时云端AI可快速根据周边一侧设备和其他车辆上报的环境感知数据,进行综合决策技术并送给目标车辆,目标车辆可以结合自身AI决策计算结果和云端AI技术结果,进行融合生成更准确的车辆执行指令。
5G网络可提供良好的空口传输超低时延(用户面数据传输时延≈0.5 ms)和大带宽(小区峰值速率DL≈20 Gbit/s UL≈10 Gbit/s),可以保障决策层云化数据传输的及时性和数据传输带宽需求。
结语及展望
综上所述,我们可以总结5G在自动驾驶技术发展中提供如下关键作用(图3)。
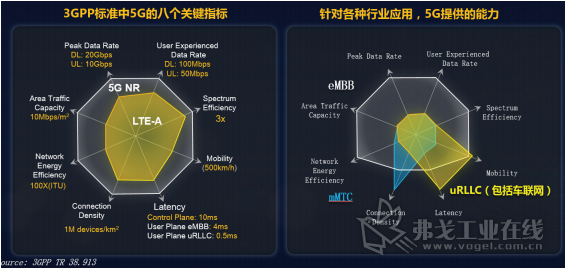
图3 5G的关键指标及提供的能力
(1)增强环境感知能力,通过5G蜂窝网络下的车车通信、车路通信、车云通信等数据交互融合为自动驾驶车辆提供广域的环境感知数据,满足全天候全路况自动驾驶需求。
(2)决策层云化和AI分层,5G网络具有空口传输低时延和大带宽特性,可以保证自动驾驶车辆与云端数据通信的及时性和可靠性需求,可以充分利用云端资源弥补车载决策系统的运算力不足的资源瓶颈。
(3)增强高精度定位,根据5G标准研究规划,后续5G网络将提供高精度定位能力,满足自动驾驶需求,弥补当前GNSS定位精度不足、RTK定位覆盖不足和IMU定位高成本等问题。
5G通信技术在标准研究和制定过程中,将车联网作为其中一个关键应用场景,并针对性定义了相关网络性能指标要求。因此,5G将强力推动实现汽车联网和自动驾驶技术发展。
随着汽车智能化、网联化程度的不断提升,未来5G网络必然会与汽车制造、汽车服务、智能硬件、互联网以及智能交通管理等多行业、多领域进行更加深入的融合,构建协同生态系统并推动自动驾驶商用落地。












![]()
2001-2009 Vogel Industry Media版权所有 京ICP备12020067号-15 京公网安备110102001177号


获取更多评论