紧急呼叫系统及整车测试解决方案
紧急呼叫系统详细解析
紧急呼叫eCall(Emergency Call)是一项起源于欧洲的技术,主要用于减少在交通事故或者其他意外情况下的响应时间。通常当事故发生时,安全气囊弹出或者传感器达到预设限值,就会自动触发紧急呼叫。车载系统 IVS(In-Vehicle System)会收集一些基本的车辆信息(包括位置、类型、乘员人数等),填入一个标准的数据格式MSD(Minum Set of Data),并通过GSM或者WCDMA语音通道或者短信的方式发送到公共安全应答中心 PASP(Public Safety Answering Point)。公共安全应答中心通过自动解析的车辆信息和与车内人员的通话了解车辆、人员受损的状况,并采取相应的措施,提供及时的救援。
紧急呼叫技术的发展
紧急呼叫的概念最早在1999年欧盟发展伽利略项目的一次会议上被提出,2001年开始立项,到2015年项目正式结束,历经十余年,终于开花结果。从2015年开始,欧洲汽车行业协会接受了欧盟关于新车和轻型商务车强制安装eCall模块的建议。从2018年4月开始,在欧盟所有上市的新车都必须强制安装eCall模块。 在俄罗斯,类似的技术ERA-GLOANSS被采用。根据俄罗斯相关技术法规,从2015年1月开始,想要获得关税同盟首次批准的进口全新车型,必须配装车载ERA-GLONASS终端;从2017年开始,关税同盟国所有上路的新车必须配装该设备。在北美,通用汽车通过它的OnStar系统来提供类似的服务。我国于2014年1月3日成立了公众紧急报警传送及定位技术推进组,中国信息通信研究院(原工业和信息化部电信研究院)为组长单位,联合公安部第一研究所、三大运营商、终端厂商等共同制定适用于我国国情的紧急呼叫定位报警技术标准、测试标准,并计划搭建演示系统,逐步向现网中推广应用。
紧急呼叫系统
1.系统介绍
一个完整的紧急呼叫系统由以下子系统组成:导航定位系统 GNSS(Global Navigation Satellite System)、车载系统IVS、基站系统 BS (Base Station)和公共安全应答中心PASP。当汽车碰撞发生触发紧急呼叫时,车载系统会自动与公共安全应答中心建立语音连接,当连接建立成功,MSD信息会通过语音通道或者短信通道发送至公共安全应答中心(图1),该中心的后台软件会解析MSD的信息,并与车载系统进行语音通话了解车内乘员的状况,并根据情况的不同采取相应的措施。
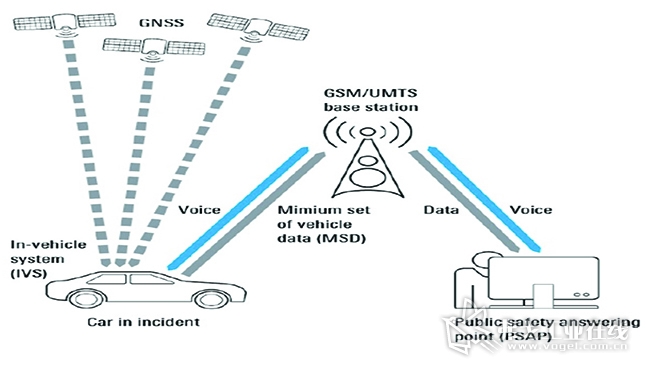
图1 紧急呼叫系统原理
2.导航定位系统GNSS
导航定位系统是为紧急呼叫系统提供实时的位置信息,在车载系统里会集成一个导航定位系统的接收机,这样就可以记录车辆的位置信息。不同的国家会采用适合本国特色的导航定位系统,欧盟的eCall采用的GPS定位,俄罗斯首选GLONASS,兼容GPS。目前我国紧急呼叫系统的标准还在制定过程中,将来很有可能采用首选北斗定位,兼容GPS的方式。
3.最小数据集 MSD
最小数据集MSD由协议EN 15722来定义,定义要传输的标准信息,比如版本信息、消息标识、控制方式、车辆ID、车辆类型及位置等一些关键的信息。MSD消息包含了140 Byte 和28 bit CRC,一共是1 148 bit长度。经过前向纠错编码后, MSD的长度是1 380 bit。MSD 由1个预同步帧和3个数据部分组成。在各个部分之间,声音是静音的。MSD 的数据采用BPPM(Biplolar Pulse Position Modulated)调制方式。基本的脉冲是一个正向或反向的偏移,一个符号可以表示3 个bit 信息。MSD 有2种模式,快速模式和鲁棒模式。在鲁棒模式下,每个符号的长度要增加1倍。这样,接收机可以在比较差的无线环境下,解出正确的数据。
4.车载系统 IVS
车载系统的主要部件,包括导航定位系统的接收机、移动通信模块、MSD处理单元、耳机和传声器等。图2是车载紧急呼叫模块的原理,以eCall为例,位置信息通过GPS接收机,进入MSD数据处理单元。当需要发送时,MSD信息会传给Modem,经过编码以后,通过RF通路,发射出去。在建立语音通道后,语音编解码器的通道会直接切换到耳机和话筒传递语音信息。
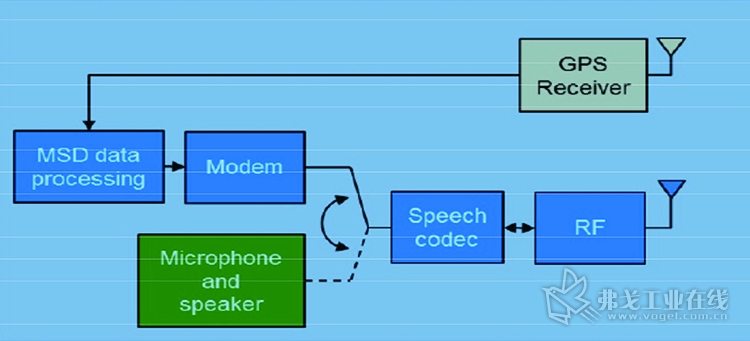
图2 车载紧急呼叫模块原理
5.基站系统BS
基站系统是复用现有的移动通信网络,在制式选择时不同国家会有不同。欧盟的eCall系统只支持GSM网络,俄罗斯的ERA-GLOANSS支持GSM和WCDMA网络。中国的紧急呼叫系统会根据中国实际的网络覆盖状况进行选择,选择最优的网络覆盖,GSM、LTE都有可能。
6.公共安全应答中心PSAP
公共安全应答中心是一个呼叫中心,在该中心的系统中会运行相应的软件。当MSD信息上报时,自动解析为协议EN 15722定义的信息。通话建立后,呼叫中心的工作人员会和车内人员进行通话,了解车内的状况,采取相应的措施。该中心可以整合医疗、救援和消防等各种应急职能,提供统一的公共安全服务。在欧盟,由112呼叫中心来承担这项职责,美国是911,国内则分属于不同的呼叫中心,缺少一个统一的整合接口。
7.紧急呼叫流程
紧急呼叫的具体流程如下: (1)当一个紧急呼叫发生时,IVS 会通过GSM/WCDMA紧急呼叫的方式自动呼叫PASP 中心,建立一个语音连接后,START消息会持续不停发送,最多5次的initiation 消息。 (2)一旦PSAP接收到eCall,并且解析出START消息,它就可以开始传送SEND-MSD命令给IVS。 (3)当IVS成功解调了SEND-MSD 命令,它发送了一个SYNC帧,紧接着是具体的MSD消息,采用RV0版本的冗余。 (4)如果PASP没有正确解析出RV0的MSD, 那么它会返回NACK。 (5)IVS接收到PASP返回的NACK后,继续发送MSD消息,此时采用RV1版本的冗余。 (6)PSAP发送了AL-ACK,指示eCall 已经完成,MSD消息已经完成解析。此时连接切回到语音方式。PSAP的话务员可以与车内的乘客通话。最后,GSM/WCDMA语音连接被释放。
紧急呼叫整车测试解决方案
从产业链的测试流程来划分,紧急呼叫的测试可以分为模块级测试和整车级测试。模块级测试主要用于模块研发,是整车级测试的第一步。模块级的测试主要是为了保证模块一致性,主要测试标准有CEN EN16454和ETSI TS 103412。关于模块级测试,主流的仪表厂商都已经推出了相应的测试解决方案,罗德与施瓦茨公司R&S(Rohde&Schwarz)推出的是基于综合测试仪R&S CMW500,导航卫星模拟器R&S SMBV和PSAP模拟软件R&S KA09X的测试解决方案,通过射频线直连用传导的方式进行测试。 对于整车级紧急呼叫测试,更关注于紧急呼叫功能的稳定性和可靠性。由于在整车级测试中,只能采用辐射的方式来测试,测试环境和条件就变得极具挑战性。主要体现在以下几个方面:①无线信道的复杂性,如何应对空间的干扰、信号的衰减,以及多普勒效应的影响,都是设计测试方案时必须要考虑的因素;②测试环境多变,碰撞会在不同条件下进行,不同场地、地形,都会对测试产生影响;③测试的高可靠性,由于是用实际车辆进行碰撞测试,重复测试的成本极高,必须保证一次成功,对测试系统可靠性要求极高。
1.测试场地及条件
根据国际通行的汽车碰撞标准NCAP和中国碰撞测试标准《CNCAP管理规则》,碰撞会有三种测试场景:一是正面碰撞,要求被测车辆以不低于64 km/h的速度,进行正面撞击;二是侧面碰撞,被测车辆停在中间位置,牵引车以不低于40 km/h的速度,进行侧面撞击;三是侧翻试验,可以进一步分为两种情况,一种是静态侧翻,被测车辆被固定在升降台上,使车辆倾斜一定角度;另一种是动态侧翻,被测车辆用轨道牵引,以不低于50 km/h的速度冲上一个15°的斜坡,引发车辆侧翻。 一个标准碰撞试验场可以分为以下几个部分:发车区域、侧碰区域、正碰区域和牵引轨道。以正面碰撞为例:进行正面碰撞试验时,被测车辆置于发车区域,由轨道牵引进行加速,达到碰撞的速度要求后,牵引钩自动脱钩,车辆撞向碰撞区域。
2.测试解决方案
罗德与施瓦茨公司是业界领先的测试测量设备供应商,有成熟的移动通信和导航定位测试设备。 R&S CMW500 综测仪可以用于模拟所有移动制式的网络(图3),为IVS提供模拟的GSM/WCDMA网络信号。R&S SMBV 用来模拟导航卫星信号,给IVS提供导航使用的GPS/GLONASS/BeiDou定位信息。R&S TSME 无线网络路测仪,可以用监测无线网络的信号,有效避免干扰。定向双极化天线用来发射网络和导航信号。基于R&S KA09X的新开发的软件紧急呼叫自动测试软件,可以用来模拟PSAP,支持MSD的显示、呼叫流程监控,自动报告生成、数据库等功能,防止意外的数据丢失。 测试流程可以分为以下三步:第一,网络和导航信号生成及IVS注册网络,紧急呼叫自动测试软件控制CMW500和SMBV产生网络信号和导航信号。从CMW500产生的网络信号经过功率适配单元后,进行放大,放大后和信号与导航信号汇入一个定向双极化天线并向外辐射。IVS搜索网络,并注册到CMW500产生的模拟网络中。第二,紧急呼叫触发以正面碰撞为例,车辆由轨道牵引不断加速,当车辆发生碰撞时,气囊弹出,触发紧急呼叫拨号。第三,紧急呼叫语音通道连接建立后,紧急呼叫测试软件收到IVS终端发送的MSD信息,根据紧急呼叫的流程建立紧急呼叫,具体流程可参考紧急呼叫流程。
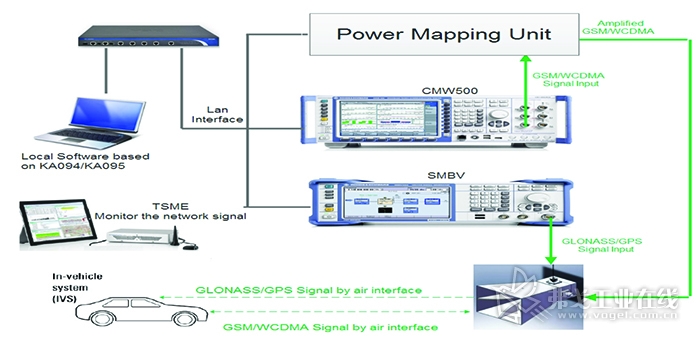
图3 R&S紧急呼叫整车级测试解决方案
3.现场试验案例
(1)上海机动车检测认证技术研究中心实车碰撞试验 2017年12月,在上海机动车检测认证技术研究中心,进行了国内首次紧急呼叫汽车碰撞试验。试验进行了三项内容:正面碰撞试验、侧面碰撞试验和静态侧翻试验,试验取得圆满成功。紧急呼叫成功建立,MSD上报成功,双向语音通话正常。 (2)中国汽车技术研究中心实车碰撞试验 2018年4月,在天津中国汽车技术研究中心,成功进行了第二次实车碰撞测试,并且首次验证了动态侧翻试验。该试验场地对网络信号的覆盖有极大的挑战,这次试验的成功对紧急呼叫整车测试方案的成熟意义重大。
总结
如何提高紧急呼叫技术的可靠性和成熟度,是所有该技术进入大规模应用时必须面对的课题。罗德与施瓦茨公司基于CMW-500和SMBV推出模块级一致性测试解决方案,对于提高车载模块的成熟度起了巨大的作用。如何解决整车级测试需求,国外虽然有一些尝试,但无论是测试的可重复性、测试成本上都存在很大的问题。本文提出的罗德与施瓦茨公司的整车级综合测试方案,试验可重复,经济性高、测试环境相对可控,经过实际的碰撞试验,进行充分的验证,取得了超出预期的结果,得到试验参与各方的大力认可。












![]()
2001-2009 Vogel Industry Media版权所有 京ICP备12020067号-15 京公网安备110102001177号


获取更多评论