自动驾驶中的可行驶走廊定义详解
情景分类及应对策略
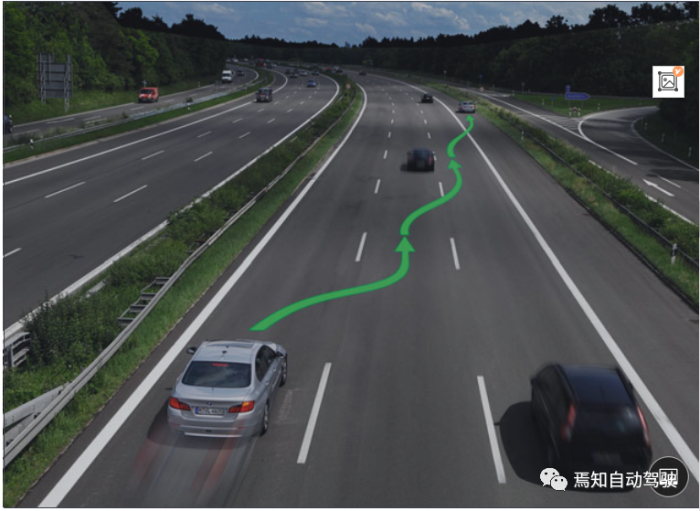
跟车控制:跟车控制需要根据传感器识别到的前车行驶状态预测作为本车预期行驶轨迹的参考,并在本车可行驶走廊内预测相应的自车行驶轨迹线,并根据该轨迹线实现本车行驶轨迹控制。
对于有限自动驾驶功能,一般可分为如下几种工况下的可行驶区域探测定义:
(一)双侧车道线清晰
若探测到本车道两侧车道线清晰,则优先根据车道线进行对中控制,并保持与前车一定的跟车距离。此时考虑本车道前方车辆行驶状态与两侧车道线做可行驶区域探测。
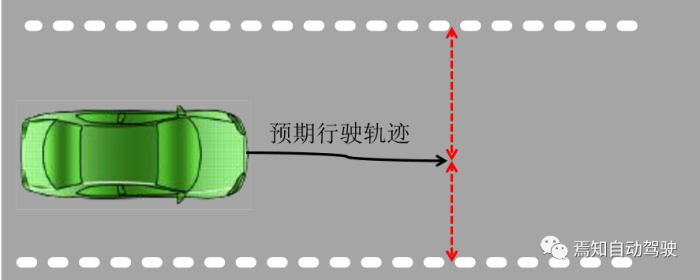
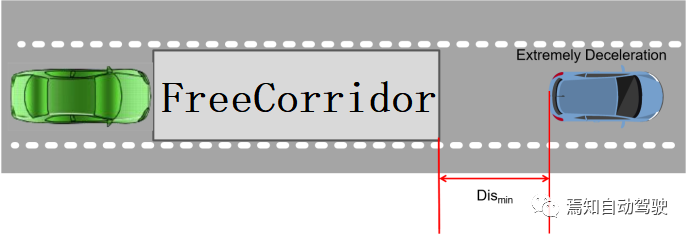
1、本车道前方车辆行驶稳定
若探测到本车道前方跟踪车辆行驶轨迹在一定误差范围内保持稳定行驶状态,未出现过大的横向移动或纵向减速移动(此工况下表明前车未出现特殊紧急情况下的换道或减速避障),则前方行驶走廊可用;
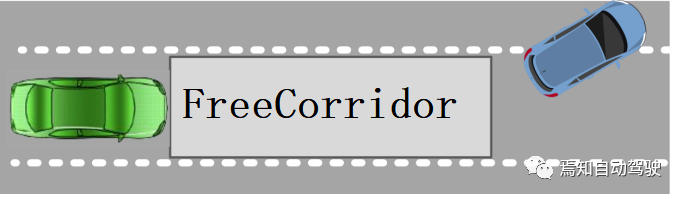
3.2)若探测到前车切出本车释放该目标同时,检测到本车道前前车有行驶车辆,重新规划本车可行驶区域为至前前车尾部探测点。
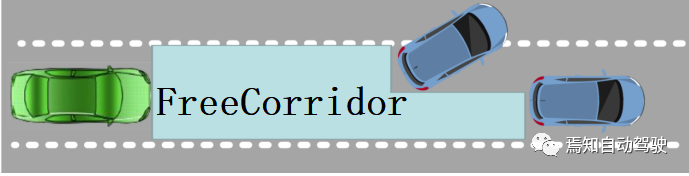
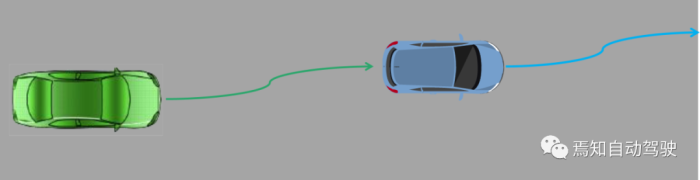
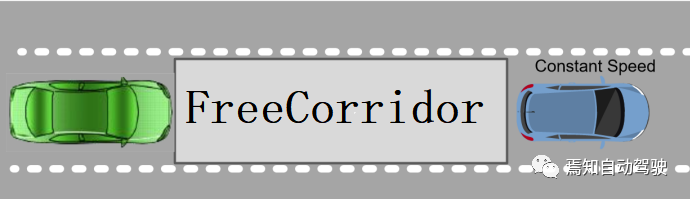
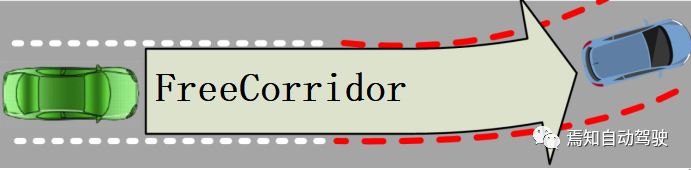
3.3)若探测到前车切出同时,有另一侧车辆切入至本车道前方,则认为该前车原始切出为正常切出,本车根据最新切入车辆做行驶目标确认,同时行驶走廊设置为跟随新目标后方的情况。(如下图)
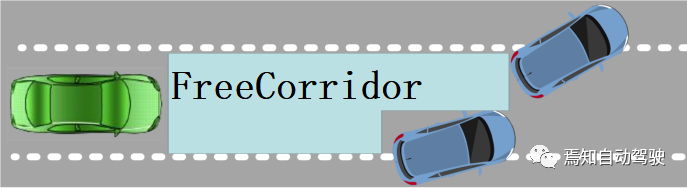
以上3.2)及3.3)两种情况下,本车辆均根据最新探测到的可行驶走廊做一定程度的稳速或降速控制。
(二)单侧车道线消失
单侧车道线的可行驶区域探测与双侧类型差不多,只是会根据车道线消失点进行可行驶区域限定,相应的限定逻辑如下:
1)若单侧车道线消失处,前车未出现如减速、切出或有新的车辆插入前方等情况,则直接根据其单侧车道线消失点模拟前方一定距离处作为可行驶区域;此时本车根据可见的另一侧车道线向内偏移一定距离,参照前述已形成的可行驶区域进行持续横向控制。

2)若单侧车道线消失时,前车已经进行减速、切出或有新车插入前方等情况,则需要结前车引导可行驶区域及单侧车道线最长模拟可行驶区域进行综合判定,选择两者中距离较短的作为可行驶区域,如下图所述,其中虚拟车道线所在的长度大于前车进行急减速或切出的点,故应该以前车切出点作为可行驶区域的探测终点;

(三)双侧车道线均消失
双侧车道线消失时,本车跟随前车轨迹进行横纵向控制,若前方车辆稳定行驶,未出现如前所述的急减速、切出且无论前前方是否有新的可跟随目标,则本车根据前方车辆的行驶状态预测其预期行驶轨迹,从而控制本车参照该轨迹进行持续横纵向控制。
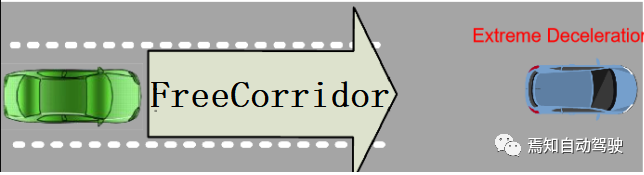
双侧车道线消失时,本车跟随前车轨迹进行横纵向控制,若前方车辆出现如前所述的急减速、切出且无论前前方是否有新的可跟随目标,则本车不再进行跟随控制,并在一定时间内将车辆减速到停。
根据高精度地图预测可行驶走廊
对于整个自动驾驶系统来说,仅仅依靠车身传感器信息进行捕捉数据很难达到全面、精确地环境信息探测,高精地图和定位作为一种被先行验证过的信息,可以弥补自动驾驶传感器功能缺陷,提供超视距的感知能力,比如,单纯依靠传感器无法准确输出弯道纵坡和横坡信息,当视线被遮挡,或曲率较大时,更需要高精地图提供的超视距信息,以便更有依据规划和控制车辆。
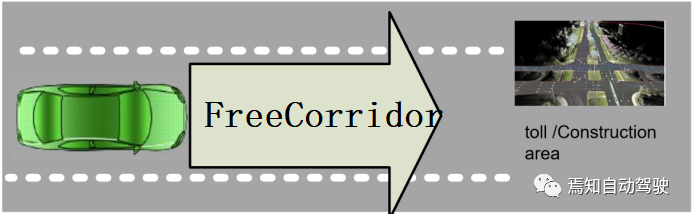
有限自动驾驶中需要搭载高精度地图进行环境预测,且相对于高精度地图而言可以发出不同的道路环境信息给TJP系统进行车辆控制,如前方道路施工信息,前方交通拥堵信息,距离收费站信息等,以上几类信息发送给TJP系统控制端后,系统中央控制器需根据其实际距离前方特殊交通情况及时修订相应的可行驶走廊,且保证在一定安全停车距离下,该行驶走廊可用。












![]()
2001-2009 Vogel Industry Media版权所有 京ICP备12020067号-15 京公网安备110102001177号


获取更多评论