解析自动驾驶中的系统技术,让你直观了解自动驾驶!
自动驾驶系统是一个复杂的系统。为了实现从A地到B地的驾驶过程,在无人车的实际使用中,需要无人驾驶系统完成感知、决策、控制三大任务,本文将主要介绍感知系统中常用的感知技术及其原理、定位系统、高精地图以及V2X技术的相关知识,同时介绍规划决策系统的相关技术与算法。
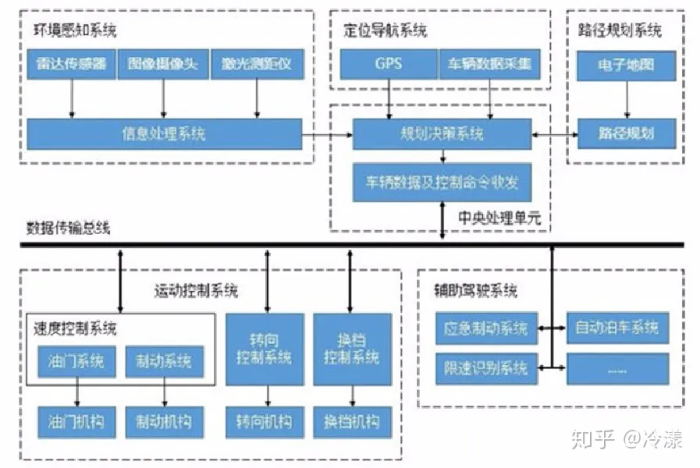
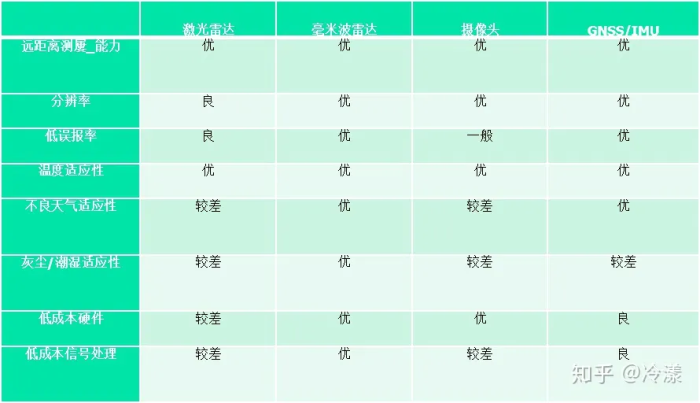
感知、决策、控制是自动驾驶的三个环节,感知环节采集周围环境的基本信息,也是自动驾驶的基础。自动驾驶汽车通过传感器来感知环境,所用到的传感器主要包括摄像头、毫米波雷达和激光雷达。下表列出了现有的多种传感器在多方面的性能对比。
一
激光雷达
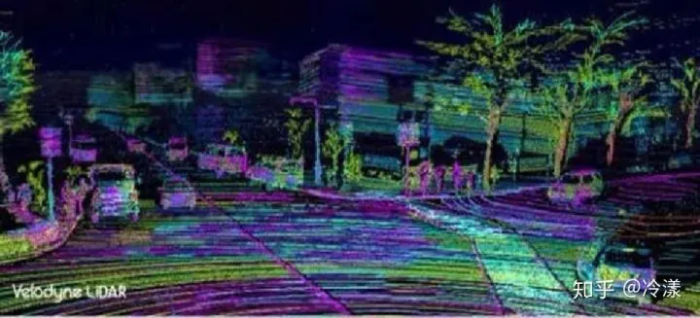
激光雷达又称光学雷达(LiDAR,Light Detection And Ranging),是一种先进的光学遥感技术。
激光雷达可以用于测量物体距离和表面形状,其测量精度可达厘米级。
激光雷达还可以联合GNSS/IMU与高精地图等手段进行加强定位,一方面通过GNSS得到初始位置信息,再通过IMU和车辆的Encoder(编码器)配合得到车辆的初始位置;另一方面,将激光雷达的3D点云数据,包括几何信息和语义信息进行特征提取,并结合车辆初始位置进行空间变化,获取基于全局坐标系下的矢量特征。
二
车载摄像头
车载摄像头的工作原理,首先是采集图像,将图像转换为二维数据;然后,对采集的图像进行模式识别,通过图像匹配算法识别行驶过程中的车辆、行人、交通标志等。
相比其他传感器,尽管无人车上配置的摄像头采集的数据量远大于LiDAR产生的数据量,但可以获得最接近人眼获取的周围环境信息。
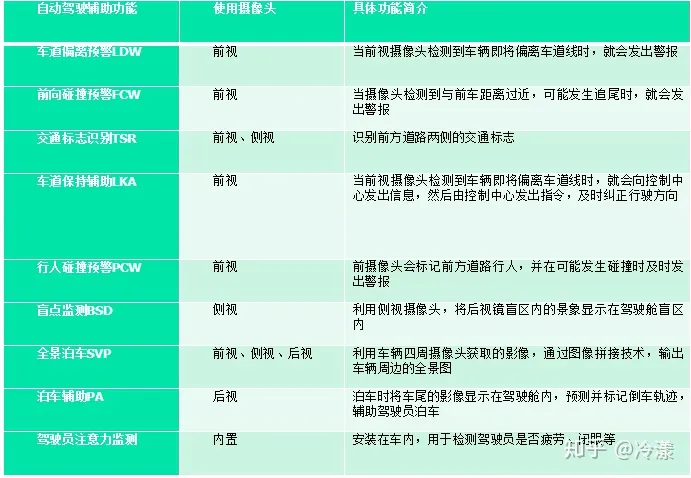
根据不同自动驾驶功能的需要,摄像头的安装位置也有所不同,主要分前视、环视、后视、侧视以及内置。实现全部自动驾驶功能至少安装6个以上的摄像头。
摄像头安装有如下要求:
(1)高动态:在较暗环境以及明暗差异较大时仍能实现识别,要求摄像头具有高动态的特性。
(2)中低像素:为了降低对图像处理器的性能要求,摄像头的像素并不需要非常高。目前30万~120万左右的像素就可以满足要求。
(3)角度要求:对于环视和后视,一般采用135度以上的广角镜头,前置摄像头对视距要求更大,一般采用55度范围。
三
毫米波雷达
毫米波就是电磁波,雷达通过发射无线电信号并接收反射信号来测定车辆与物体间的距离,其频率通常介于10~300GHz频域之间。与厘米波导引头相比,毫米波导引头体积小、质量轻、空间分辨率高;与红外、激光、电视等光学导引头相比,毫米波导引头穿透雾、烟、灰尘的能力强;另外,毫米波导引头的抗干扰性能也优于其他微波导引头。
毫米波雷达具有全天候,全天时的工作特性,且探测距离远,探测精度高,被广泛应用于车载距离探测,如自适应巡航、碰撞预警、盲区探测、自动紧急制动等。
毫米波雷达的测距和测速原理都是基于多普勒效应。
四
超声波雷达
超声波雷达,是通过发射并接收40kHz的超声波,根据时间差算出障碍物距离。其测距精度大约是1-3厘米左右。
常见的超声波雷达有两种:第一种是安装在汽车前后保险杠上的倒车雷达,称为超声波驻车辅助传感器(UPA);第二种是安装在汽车侧面,称为自动泊车辅助传感器(APA)。
超声波是一种机械波,使得超声波雷达有着根源性的局限性:
(1)对温度敏感。
(2)超声波散射角大,方向性较差,无法精确描述障碍物位置。
五
环境感知
车道线检测是智能车辆辅助驾驶系统中必不可少的环节,快速准确地检测车道线在协助自动驾驶路径规划和偏移预警等方面尤为重要。目前较为常见的车道线检测方案主要是基于摄像头及传统计算机视觉的检测,同时随着自动驾驶技术的逐步发展,基于激光雷达等高精设备的车道线检测算法也被提出。
传统计算机视觉的车道线检测主要依赖于高度定义化的手工特征提取和启发式的方法。
基于道路特征的检测方法根据提取特征的不同,可以进一步分为基于颜色特征、纹理特征和多特征融合的检测方法。
车辆定位是让无人驾驶汽车获取自身确切位置的技术,在自动驾驶技术中定位担负着相当重要的职责。车辆自身定位信息获取的方式多样,涉及到多种传感器类型与相关技术,本文将从卫星定位、差分定位、惯性导航定位及多传感器融合定位几个方面进行介绍。
卫星导航定位系统是星基无线电导航系统,以人造地球卫星作为导航台,为全球海陆空的各类军民载体提供全天候的、高精度的位置、速度和时间信息。
目前世界上著名的卫星导航系统有美国的全球定位系统(GPS)、俄罗斯的全球导航卫星系统(GLONASS)、中国的北斗卫星导航系统(BDS)以及欧盟伽利略(Galileo)系统。
GNSS定位主要解决两个问题:一是观测瞬间卫星的空间位置,二是测量站点卫星之间的距离。空间位置即GNSS卫星在某坐标系中的坐标,为此首先要建立适当的坐标系来表征卫星的参考位置,而坐标又往往与时间联系在一起,因此,定位是基于坐标系统和时间系统来进行的。
GNSS定位系统是利用基本三角定位原理。分别以三个卫星的位置为圆心,三个卫星据地面某点距离为半径作球面,则球面交点即为地面用户位置。
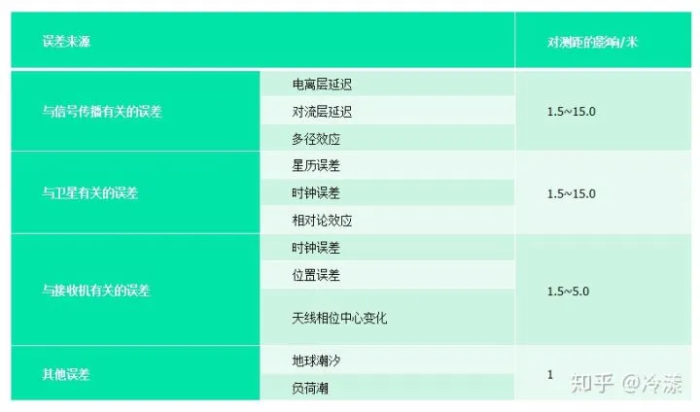
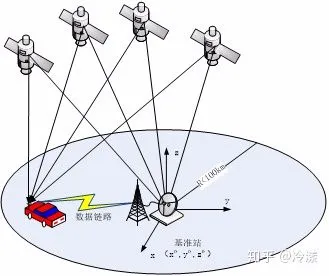
差分GNSS的基本原理是在一定地域范围内设置一台或多台接收机,将一台已知精密坐标的接收机作为差分基准站,基准站连续接收GNSS信号,与基准站已知的位置、距离数据进行比较,从而计算出差分校正量,减少甚至消除GNSS中用户站由于卫星时钟、卫星星历、电离层延迟与对流层延迟所引起的误差,提高定位精度。












![]()
2001-2009 Vogel Industry Media版权所有 京ICP备12020067号-15 京公网安备110102001177号


获取更多评论