电动汽车同轴式电驱动桥力学特性分析

同轴式电驱动桥具有结构紧凑、体积小 、传动效率高、成本低等优点,是针对纯电动汽车的结构布局和传动特点而设计的一种机电一体化驱动系统,因此适合应用于微型电动汽车上。Cai等对几种电动汽车的驱动系统布置形式进行了介绍,并对根据性能要求对设计方法进行了阐述;
设计了一种带同轴电机的驱动桥,并对其结构 和工作原理进行了说明;秦建军 "等针对特种电动车辆设计了一种将电机、减速器 、差速器和轮轴在结构上设计成整体的驱动系统传动方案,并对重要的联接进行了结构设计和强度校核;设计了一种将机械差 速器容纳于电机转子的机电一体化驱动系统 ,并进行整车性能仿真分析和续驶里程仿真 ,验证了设计的正确性与可行性。目前针对同轴式驱动桥进行的研究大多集中在设计方面且只对其部分传动部件进行了简单的强 度校核,而由于其结构上的特殊性,将同轴式驱动桥的电机和传动系统作为一个完整的 系统进行的分析是有必要的。本文以某微型 商用车的同轴式电驱动桥为研究对象,采用 开关磁阻电机作为驱动电机,对传动系统的 力学特性进行了相关研究。


同轴式电驱动桥结构与传统汽车的驱动桥有诸多不同之处,电机定子与底盘固定在一 起 ,驱动系统的电动机轴是一种特殊制造的空心轴,在电动机输出轴端盖处,装置驱动 桥的差速器,差速器壳体与空心轴铸为一体, 其中一根驱动桥的半轴是从电动机的空心轴中 通过,另一根半轴由差速器直接带动,两个半 轴与电动机的输出轴在同一轴线上。
搭载所研究驱动桥的纯电动汽车为微型商用车 ,主要用于市内交通 ,最高时速为 80km/h, 采用轮边减速器,通过等速万向节与驱动桥半轴相连,如图 1所示 。
驱动电机为6/4极开关磁阻电机,额定转速2500r/ min,峰值转矩为70N • m。基于Romax建立了传动系统的模型,由于模型较为复杂,因此在不影响结果的前提下对模型进行了简化,如半轴齿轮与半轴的 联接用刚性联接代替。电机转子和差速器壳 体是在Catia中建立模型再进行网格划分后导人 Romax中。差速器壳体的有限元模型如图 2 所示 ,
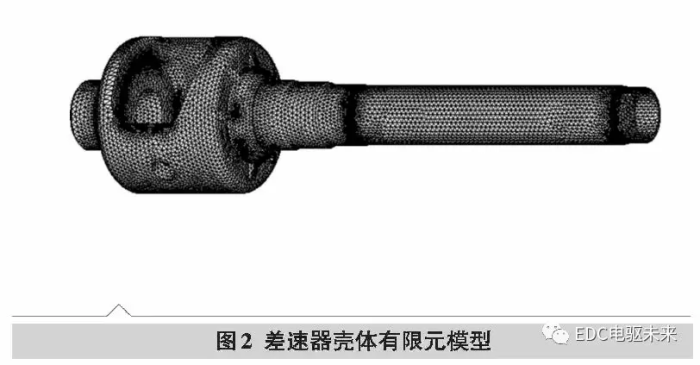
采用四面体网格划分,网格尺寸控 制 在 3mm,共划分出 34 038个 节 点 ,145 498 个单元。各部件材料属性如表1所示。

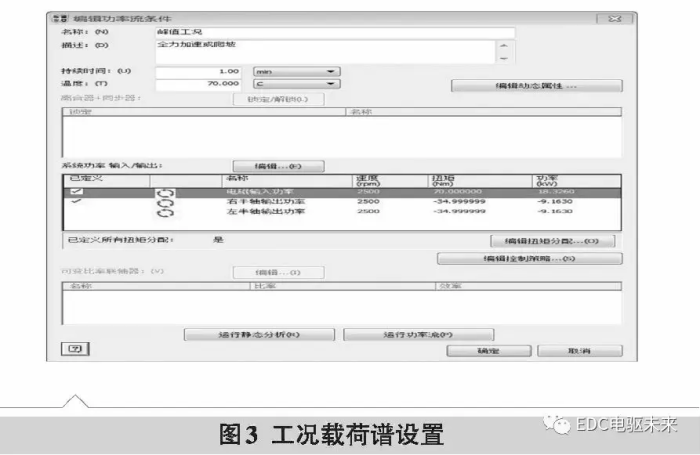
将电机输出的峰值转矩作为传动系统的输入转矩,在 Romax中对传动件进行静力学分析。汽车在全力加速和爬坡时可认为是直线行驶,此时差速器不工作,相当于一个等臂推杆,因此转矩平均分配给左右半轴,因此设置左右半轴的转矩输出为35N. m,如图3所示。
( 1 )差速器壳体结果分析
差速器壳体是该传动系统中的一个关键部件 ,形状不规则且受力复杂,因此对其进行有限元分析。图 4 为上述工况下,差速器壳体的 偏移量和应力云图。
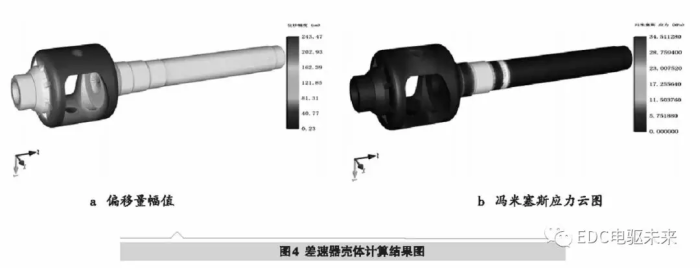
可以看出,差速器壳体的最大偏 移 量 为243.47um,出现在 X 轴方 向,变形较大的位置主要在两侧安装止口边 缘和鼓形壳体上。由于右半轴从差速器壳体 的空心轴中穿过,两者间有相对转动,且空心轴的直径受到电机转子轴径的限制,因此 空心轴应具有足够的刚度和强度的以保证两 者不发生干涉,结果显示空心轴处的偏移量集中在 100um,对左半轴传动影响不大。应力云图显示孔边缘、空心轴和右侧阶梯轴上有应力集中,但应力均不大 ,仅为 34.5MPa, 这样的应力虽然不会造成轴的屈 服失效,但容易引发疲劳损坏(虽然应力分 布是在最大转矩的极限工况下得出来的,但根据静力学理论,在常规工况下此处也存在 应力集中),可进行相应的优化,如増加阶梯 轴过渡区域圆角半径,从工艺上降低空心轴 表面改善表面质量。
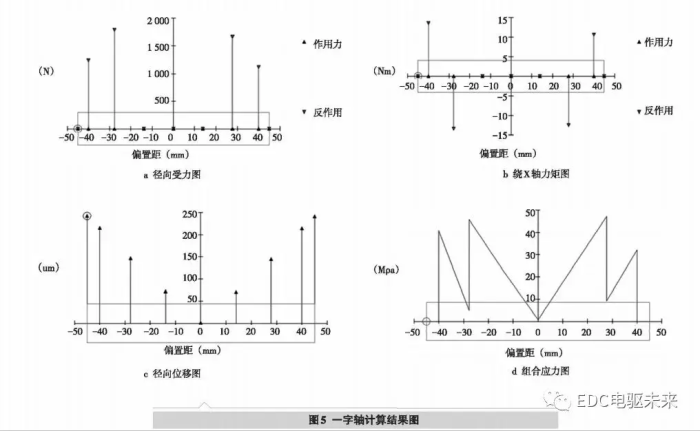
(2) 一字轴结果分析
一字轴长期承受冲击载荷,是传递转矩 的重要部件,而且它的变形对齿轮啮合有较大影响,其强度和刚度需要得到重视 。与一字轴接触的有差速器壳体和行星齿轮,受到差速器壳的推力和行星齿轮的阻力形成剪切力和弯矩,因此轴的端部和行星齿轮安装位置的受力较大,可能存在危险截 面。但由图5d可知 ,弯曲应力是主要应力,虽然轴上存在应力集中,但最大应力仅为47MPa, 远小于材料的屈服强度 。一字轴的最大径向位移出现在轴的两端为 242.5um, 与差速器壳体轴孔X 方向的位移十分接近,且由两端向中点递减,结合图4b可知(壳体局部坐标 的 X 方向对应于一 字轴的Y 方向 ),主要原因是差速器壳体的 变形造成其上的轴孔发生偏移,从而使得轴的每一个截面相对于原位置产生了线位移 ,故应采取相应的措施提高差速器壳体 的刚度以减少壳体变形对齿轮啮合的影响。
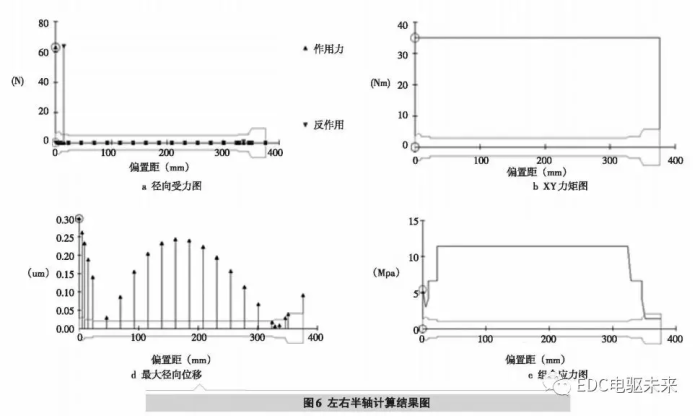
(3)半轴结果分析
由于汽车直线行驶,行星齿轮和半轴齿 轮没有相对转动,转矩被平均分配给左右半轴 ,两半轴受力情况相同,所以只针对右半 轴进行分析,左半轴同理。半轴传递的转矩 为电机最大转矩的一半,在工作过程中,半 轴齿轮受到来自行星齿轮的输出载荷导致齿 轮根部一端受力较大,半轴末端产生对圆锥 滚子轴承的轴向反作用力。半轴与半轴齿轮 之间通过键联接,且在两半轴有差速时还需 承受齿轮嗤合的冲击载荷,应保证此处的应 力不会对联接造成破坏,峰值转矩工况下半 轴的最大组合应力为11.5MPa,出现在直径最小一段,其中起主要作用的是扭转应力。另 外 ,半轴的最大径向位移相当小,这样的变 形对传动几乎没有影响(图6所示)。
(4)齿轮弯曲应力分析
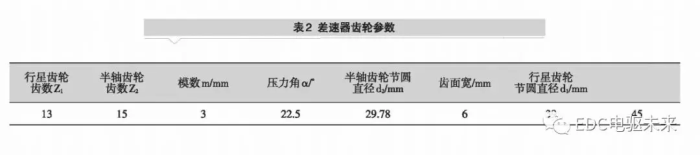
对汽车差速器齿轮来说,疲劳强度不是 主 要 矛 盾 ,弯曲强度是主要考虑的因素〜。Romax计算得到差速器齿轮的弯曲应力为 137MPa,安全系数为 6.1。为了对计算结果 进行验证,下面将使用传统的计算方法对齿 轮在最大转矩下的弯曲应力进行计算。齿轮 参数如表 2所示。
传统算法中,差速器齿轮的弯曲应力可 用 公 式 (4 ) 计 算

式中,K0为超载系数,K0=1; Ks为尺寸系数 ,Ks=0.749; Km为载荷分配系数 ,Km= 0.6; n为行星齿轮数目,n=2; Kv为质量系数,Kv=1 ; J为差速器齿轮弯曲应力的综合系数,J=0.223;
计算得 Qw=171MPa, 大 于 Romax计算的弯曲应力,这说明传统计算方法相对保守。齿 轮 材 料 选 用 20CrMnTi,屈 服 极 限 为 835MPa, 安全系数为 4 . 9 ,具有较大的安全裕度。

建立了同轴式电驱动桥的传动系统模 型 ,在最大转矩工况下对其关键部件进行了力学分析,发现最大偏移量发生在差速器壳 体上 ,为 237.62um, 不会影响系统的正常运转 ,各个部件的所受载荷处于正常范围,强 度均满足工作要求,但部分位置存在应力集中现象。












![]()
2001-2009 Vogel Industry Media版权所有 京ICP备12020067号-15 京公网安备110102001177号


获取更多评论