预防车道偏离的功臣-车道保持辅助系统解析
近年来各大主机厂加速推出各式各样ADAS驾驶辅助系统,提供驾驶者更加安全、便利及舒适的驾驶环境。驾驶辅助系统是经由传感器侦测环境与车身的信息,实时告知驾驶者当下驾驶状态或者可能风险,并经由控制器决定出合适的驾驶命令给底盘系统修正车辆的行驶状态。
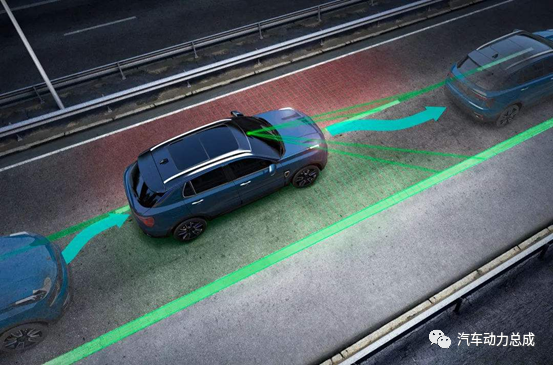
根据车辆控制的形式可分为纵向和横向控制,纵向控制掌管车辆加减速动作,横向控制掌管车辆横向动作。车道保持辅助系统属于横向控制系统,控制器在特定条件下可协助完成部分驾驶任务,驾驶员可依驾驶意图或环境状况随时取回车辆控制权。其功能为控制车辆横向运动,以避免非驾驶意图的车道偏移现象,让车辆维持于车道内行驶,适用在车道标线清晰且曲率在一定范围内的道路上,目前市面在售车辆大多需在车速大于 60kph 以上才开始运行,且不允许驾驶者释手驾驶过久。

以转向控制的横向控制系统来说,该车需配备电动助力转向系统(Electric Power Steering, EPS),控制转向系统的电机来修正车辆的行驶方向;而以刹车控制方式的横向控制系统来说,该车需配有电子车身稳定系统(Electronic Stability Control, ESC),通过控制个别轮胎刹车力以产生车辆横向力矩来修正车辆的行驶方向,目前市场在售车辆的车道保持辅助系统大多以转向控制方法来实现。
车道保持辅助系统功能分类
车道保持辅助系统的车道保持控制方式可分为两种形式:
(1)第一种形式为当靠近车道线时,系统才会提供转向修正力矩来改变车辆行驶方向,使车辆维持在车道内行驶,转向修正力矩与车辆于车道的关系如图 (a)。
(2)第二种形式为全程进行转向控制,转向修正力矩是根据偏离车道中心线的程度进行调整,以确保车辆维持在车道中心线附近行驶,转向修正力矩与车辆于车道的关系如图(b)。
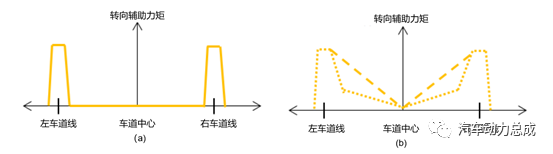
上述两种型式的车道保持辅助系统皆有最大转向修正力矩限制,当车辆无法维持于原车道行驶,且快要跨越车道线时,都会给予驾驶者车辆即将偏移车道的警示。
车道保持辅助系统的组成架构
基于 EPS 的车道保持辅助系统之系统组成架构如下图,主要分为四个部分传感器、信号处理及决策控制模块、人机交互界面以及执行器。
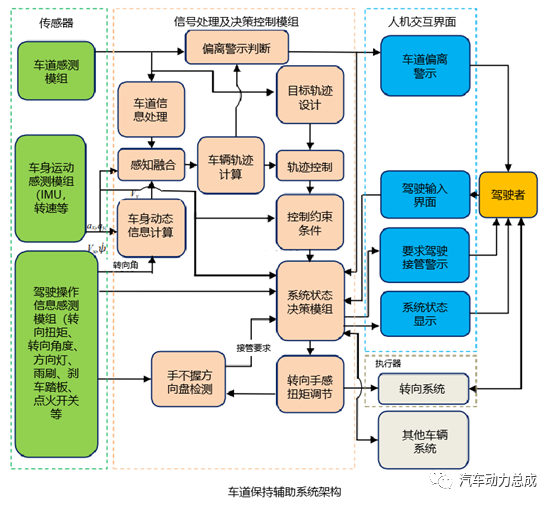
传感器
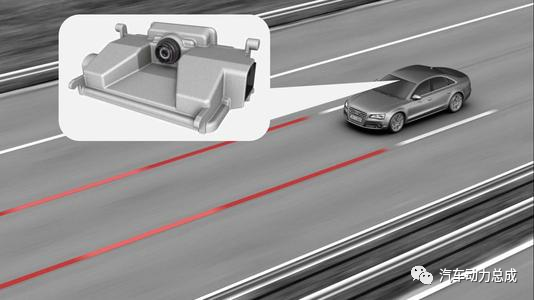
传感器主要有用于车道辨识的传感器,例如摄影机;监测车身运动信息的感测器,例如:轮速传感器、惯性测量组件等;驾驶操作信息感测模块,比如驾驶转向的力矩和方向盘角度、方向灯信号、刹车踏板信号等。其中车道辨识传感器是感测核心,其精度、可用性和可靠性影响车道保持辅助系统的质量。
信号处理及决策控制模块
车道辨识模块辨识车道线信息并估算车辆与车道的相对关系,包含侧向偏移、方位角(heading angle)、曲率等信息。同时融合车道信息和车身运动信息,来提升车道辨识的准确性。
轨迹控制会根据预测轨迹和目标轨迹估算行驶偏差,并考虑车辆动态响应特性与安全舒适因子计算实现轨迹控制命令。
偏离警示判断模块会根据跨越车道线距离并计算跨越车道线时间,判断是否要给予驾驶者车道偏离的警示。
系统状态决策模块根据车道偏离、车辆动态、驾驶者行为等信息作为系统功能作动与否的条件。有些设计也会结合盲点监测系统/并线辅助系统的信息,如在进行车道变换过程有碰撞可能时,车道保持辅助系统主动介入,使车辆驶回原车道以避免追撞。
转向手感力矩调整模块决定驾驶者系统使用感受,模块会调整可接受的辅助力矩给予驾驶者,避免过度干扰驾驶者的操作。
执行器
此系统应用的执行器为转向系统,转向控制器执行决策控制模块的命令提供驾驶辅助力矩。转向系统设计时须考虑系统共振与操作响应,以确保转向操作性能需求。
人机交互界面
系统状态通常以图案显示在仪表,并搭配声音及/或触觉(例如:方向盘震动、座椅震动、拉紧安全带、或者短暂刹车等)的方式来提供警示信息。

车道保持功能虽然功能强大,在理想的状态下确实能起到主动安全的作用。但是实际工作起来可能车主会褒贬不一。主要是因为车道保持功能是基于车道线工作,摄像头的辨识能力会受到天气和照明度的影响。因此建议在路况良好且车道线清晰的道路上使用效果会更好。比如在日出日落之时,光线会直射摄像头以及雨雪潮湿天气的情况下,系统性能会有显著的下降,严重情况下系统会发出告警(包含声音、文字、故障灯)。
由于系统基于视觉识别,可能存在识别错误的情况,比如行驶在有道路边缘的车道时如隔离带、路沿,存在识别道路边缘为车道线的可能。另外,受到驾驶控制能力的限制,目前的车道保持辅助对于急转弯这样的极限工况下,控制能力就会不足,比如系统无法在弯道半径小于250m的道路上激活,或者即使激活,车辆有可能发生偏离自车道的现象等等。












![]()
2001-2009 Vogel Industry Media版权所有 京ICP备12020067号-15 京公网安备110102001177号


获取更多评论