基于线控转向系统的无人驾驶技术发展
随着线控技术的日益成熟,越来越多的汽车将采用线控转向系统。该文介绍了传统线控转向系统的布置形式,讨论了技术难点和优势。在传统转向技术的基础上,介绍了无人驾驶系统中的线控底盘,以及其在无人技术中的应用,分析了国内外几种典型无人车的转向系统和应用特点。最后,对基于线控转向系统的无人驾驶技术进行了展望。
一
1.1 线控转向系统的方案和构件
在线控转向系统中,舒适性和安全性将得到进一步提升。在发生故障的情况下,具有全部功能或部分功 能的冗余系统能代替原系统继续发挥作用。冗余系统通常分为液压系统和机械系统。图 1 示出线控转向系统方案示意图。
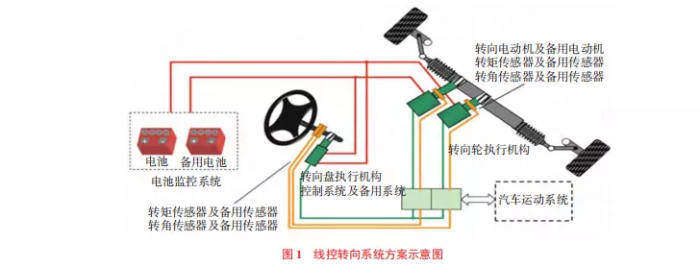
线控方案分为2个部分,即转向盘模块和转向轮模块[2]。在转向轴上方的转向盘模块包括了一个转向盘,一些测量转角、转向力或转矩的传感器和一个将路面情况反馈给驾驶员的路感电动机。在 2 个模块之间可以看到机械传动装置。
1.2 带有液压冗余系统的线控转向
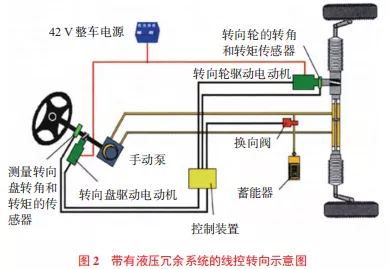
液压的冗余系统可以取消传统系统中连接在转向 盘和转向轮之间的转向轴,这也是采用线控系统的优势[3]。此外,液压系统非常适用于重型汽车。在转向盘模块中,手动泵通过软管和管路与一个在齿条传动装置中集成的工作缸相连,由此组成了紧急状态下的替代转向系统。紧急转向系统的开关由一个带有弹簧的换向阀控制。图 2 示出带有液压冗余系统的线控转向示意图。
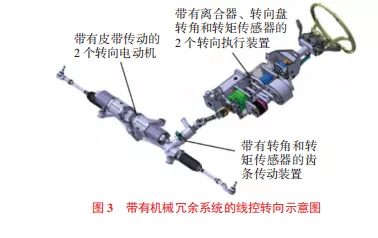
但是这个方案减弱了线控转向系统的优势,机械机构占用了更多的空间,给布置带来不便。英菲尼迪 Q50 的门禁自诊断就采用了转向盘和转向轮的直接机械连接作为冗余系统。
线控转向系统的技术难点和优势
2.1 线控转向系统的技术难点
线控转向系统需要实时地通过手柄给驾驶员尽可能准确地传递有关轮胎、路面和离合器啮合情况的触觉信号。这些信息对驾驶员来说有重要的参考意义,因为驾驶员可以据此调节合适的驾驶速度,并据此进行加速和刹车。此外,为了保证驾驶员的安全,就必须保证更为复杂的电子系统的运算不会出错。而在电动和混合动力汽车中,电动机直接驱动转向轮,安装线控系统的安全性要高于内燃机车。
2.2 线控转向系统的优势
2.2.1 高适应性和灵活性
通过这种方式,借助于参数化的软件,转向系统可以适应各种车型。由此可以调节车辆的驾驶灵敏度,实现与车型的匹配。还可以根据驾驶与那的习惯设置个 性化的参数[4] ,并将数据存储下来。此外,线控转向还可以根据速度调节传动比、转向幅度、转向偏差,实现自动停车入位等,提高驾驶稳定性[5]。
2.2.2 自动转向和新功能的实现
通过将转向盘和转向轮分开的方式,能实现更多功能。当车载传感器发现驾驶员未察觉到的障碍物时,可以进行全自动的方向控制和转向机动[6]。一个与制动、传动系统相结合,完全实现自动化的驾驶系统将在不久的将来得以实现。
2.2.3 降低生产成本
当软件上能完成更多的硬件任务时,就能显著降低线控系统的成本,从而更易被市场认可。此外,每个转向轮可以实现单独转向,2个前轮的转角由软件通过 一定的算法进行计算,使得当今使用的各种悬架得到大大简化。
基于线控转向的无人驾驶技术

这种解决方案使得汽车的布置和构造较为固定,并且一直延续着旧有的发展趋势。
3.1.2 线控式底盘
汽车底盘传动系和行驶系的一体化可以使汽车的质心更低,底板总成更平,对于汽车内部空间的布置灵活性更大。其中一项关键技术就是应用各种功能的线控技术并采用全电气化的传动方式。宝马 i3 线控式底盘,如图 5 所示。

这种底盘可以使得布置更加灵活,取消了发动机的限制条件后可以提高工艺性、舒适性并发挥出更大的空间优势,使得更密集的安装得以实现[7]。这种形式的底盘在理论上可以实现无人驾驶,也可以称作“无人驾驶底盘”。
3.2 线控转向在无人驾驶中的发展现状
3.2.1 国内发展现状
我国的无人驾驶技术始于20世纪80年代,国家立项研究“遥控驾驶防核化侦察车”。之后,高等院校和科研机构陆续开展无人驾驶汽车的研究,目前大多还处在研发阶段。“八五”期间,由北京理工大学和国防科技大学等5家单位联合研制成功了 ATB- 1 无人车,行驶速度可以达到 21 km/h,这是我国第一辆能够自主行驶的测试样车[8]。此后,我国无人驾驶技术得到快速发展。2015 年 12月,百度首次实现了城市、环路和高速道路混合路况的无人驾驶测试,最高车速达100 km/h[9]。2017年,百度无人车在线控转向系统的基础上,结合 Road Hacker 平台实现了全球在真实道路上实现端到端模式的自动驾驶。通过对人驾驶行为的模仿,不断学习以及算法调整,自动驾驶过程越来越稳,实现了较为平顺的转向效果。图 6 示出百度无人车.

3.2.2 国外发展现状
互联网公司谷歌在街道交通中也进行了一系列测试。谷歌的第一款无人驾驶汽车原型“萤火虫”配备了各种传感器,包括雷达、激光测距系统、车道保持系统、红外摄像头和GPS/惯性导航系统等[10]。图 7 示出谷歌无人车原型“萤火虫”。
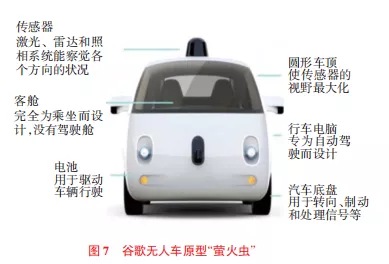
行车电脑将指令发送给行驶系统,通过线控系统控制无人驾驶汽车转向。线控系统的布置使得汽车的结构更加紧凑,行驶更为平稳,从而更适宜在拥挤的城市路况中行驶。由于取消了传统汽车中的机械传动装置,整车更加轻盈,更有利于提高动力学性能,对交通 和路面状况做出快速响应。
电动车制造商特斯拉同样致力于制造实现无人驾驶的汽车。2017年底,特斯拉汽车实现了从洛杉矶到纽约的无人驾驶。现在所有的特斯拉汽车均采用8台摄 相机,代替了之前的超声波和雷达传感器,具有更大的视野范围,如图 8 所示。
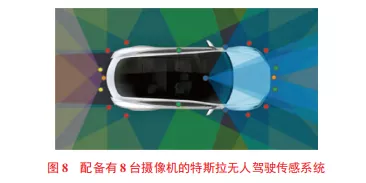

这种汽车底盘可用于各种型号的汽车,从家用轿车、皮卡车到轻型载货车。线控转向系统使得整个汽车空间的布置更加灵活,并且与提供能源的电池制成一体,既增加了汽车内部空间,又提高了车辆行驶稳定性,所以,线控转向系统在特斯拉电动车中成为了实现无人驾驶的必要技术保障和硬件基础。
结论
通过对线控转向系统的介绍,以及对无人驾驶技术发展的分析,可以发现线控转向系统由于体积小、布置灵活、转向便捷,正好能满足无人驾驶汽车方向实时控制的要求,并给乘坐者提供较大的乘用空间,因此是实现无人驾驶技术的必要前提条件。
总的来说,目前,线控转向系统在无人驾驶领域已经取得了巨大的进步。但是,还有很多尚未解决的技术难题,仍然存在很多不能回答的问题。一方面,线控转向系统并未大规模地推广,并未给无人车的发展完全铺平道路。无人车技术仍然不是很成熟,不能大范围地进行实际道路试验。另一方面,社会还未完全接受无人车,还有很多法律法规需要完善。
未来的无人车将对汽车智能化提出更高的要求,线控转向系统也将日益成为无人驾驶技术的主流。可以相信,随着线控转向系统的普及,全自动驾驶汽车终有实现的那一天。












![]()
2001-2009 Vogel Industry Media版权所有 京ICP备12020067号-15 京公网安备110102001177号


获取更多评论