自动驾驶的核心?浅谈线控转向技术
此前我们已经说过了很多关于自动驾驶相关的一些技术和概念,但多数都是围绕着智能驾驶方面所展开讨论的,一直有一个概念并未提及——线控转向技术。

如果发动机和变速箱是传统能源汽车的核心技术,那线控转向技术或许会成为未来智能汽车急需掌握的一项核心技术。
何为线控转向系统?
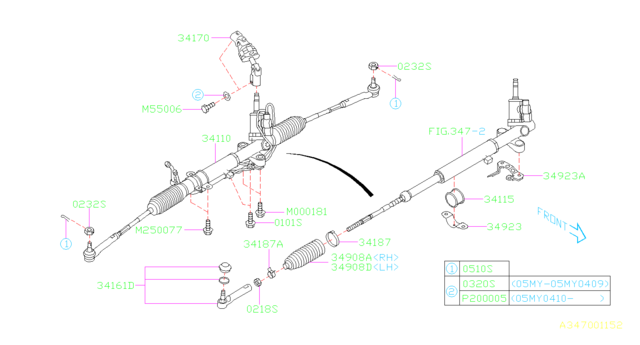
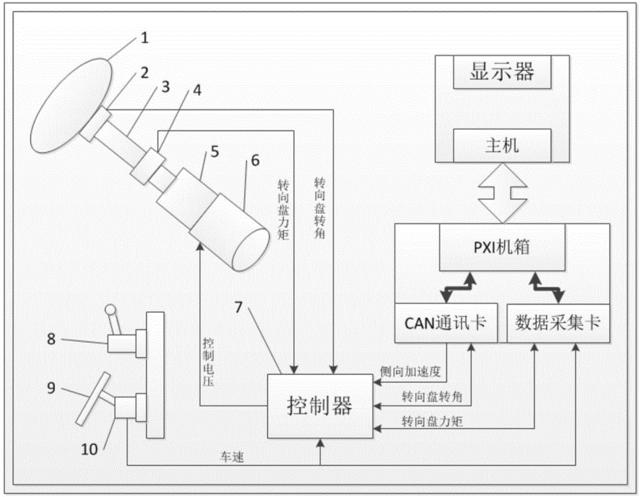
如果用一句话来概括什么是线控转向:就是把依靠转向管柱连接转向机构来实现转向的传统方式,转换成为通过传感器检测方向盘角度信号,并通过电脑控制伺服电机来实现驱动转向的转向系统。

上图为SBW(steering by wire)系统的基本布局,驾驶员对方向盘的操作仅仅只是在驱动一个转角传感器,并由方向盘电机提供转动阻尼和回馈,方向盘与前轴转向机构之间没有任何刚性连接。
何为线控转向系统的关键?
说到这里有人肯定为提出疑问:作为转向系统,它就像刹车系统一样,是关系到行车安全的重要装置,如果取消了转向管柱,那么一旦传感器或者伺服机构发生故障应当如何应对?
事实上,SBW线控转向系统有两种“冗余”设计方式,用于应对部件失灵造成的特殊状况:
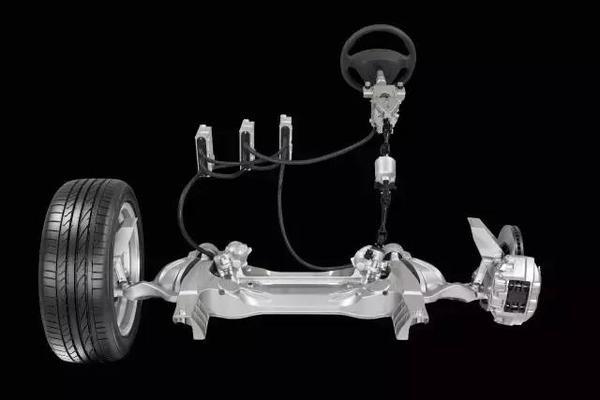
第一种,仍然通过传统的转向管柱将方向盘与转向执行机构连接在一起,基本形态与普通燃油车无异,但在转向管柱与转向执行机构之间有电控多片离合器相连。
正常情况下,多片离合器为断开状态,就是说,虽然转向管柱仍然存在,但并不起作用。只有当伺服机构发生故障的紧急情况下,离合器才会接通。
接通后,通过方向盘与转向机构(齿轮齿条机构)的刚性连接仍然能够实现转向操作,只是手感会变重一些。

我们熟悉的率先在量产车上采用线控转向的英菲尼迪Q50采用的就是这样的冗余方式。
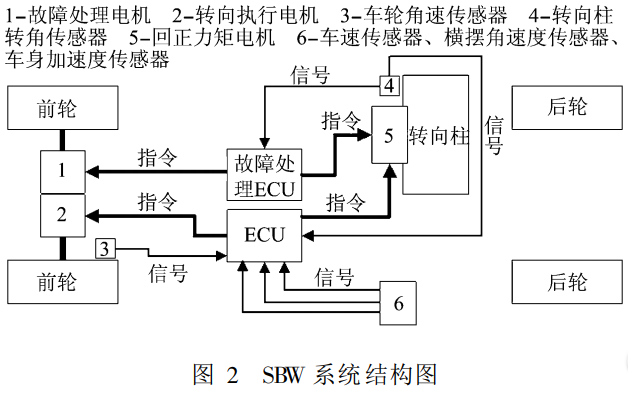
第二种,在执行机构处(转向机构)采用多个电机控制来实现冗余度,在方向盘处通过多个传感器布置来实现输入信号的冗余度。

这种冗余方式更先进,但成本非常高,这相当于需要制造两套重复的转向机构。但是这种设计可以完全取消掉转向管柱,从可靠性上来说甚至可以取消掉方向盘,实现L4以上的自动驾驶级别,也是自动驾驶必须要的转向系统配备。

这种SBW线控转向系统完全取消了转向管柱设计,但还没有应用在任何一台量产车上。所以,在这种纯SBW量产之前,所有宣传的自动驾驶都无法达到L4以上(含L4)的级别。
写在后面
几乎国内所有造车新势力在宣传的过程中都逃不开智能汽车这个主题。但是要想实现自动驾驶,SBW是各个车企绝对绕不开的核心技术。这项技术就像燃油时代的变速箱技术一样重要。所以全球各大供应商早在数年前就投入巨资进行研发,布局了SBW相关的产品。
如果说,要想实现自动驾驶,Ai智能算法以及机器学习是软件方面的核心要素的话。那么高精度传感器和SBW操纵机构则是绕不过去的硬件门槛。
无论是传统EPS转向机构还是更高级的SBW都需要投入巨资研发,所以可以预见,未来这种关乎到汽车智能化和安全性的技术只会集中在少数几家供应商巨头手中,就像变速箱一样。












![]()
2001-2009 Vogel Industry Media版权所有 京ICP备12020067号-15 京公网安备110102001177号


获取更多评论