电动车半轴角度及节型对电驱系统振动影响研究
文章来源:中国汽车
发布时间:2021-06-07
]电动车加速工况出现的轴向抖动问题,严重影响驾乘人员的主观感受。本文基于台架试验的方法,消除整车的干扰,研究电驱系统本体的轴向抖动问题。综合采用时频分析,对比分析等方法,首先确定了电驱系统轴向抖动的原因,然后对其影响因素进行了深入探讨,并根据研究结果提出改善该问题的设计建议。研究表明,加速工况轴向抖动是由于半轴的阶次激励激发了电驱系统的刚体模态而引起;半轴的阶次振动幅值随半轴安装角度的增大而有所增大,但GI 节型半轴对安装角度更敏感;AAR 节型半轴的阶次振动幅值远小于GI 节型半轴的阶次振动;电驱系统布置设计时,应尽量减小半轴安装角度并使用AAR 节型半轴。
电动汽车产生的NVH 问题与传统燃油车有很大不同。电动车虽然不会有发动机,液力变矩器等部件引起的抖动问题, 但是电驱动系统会产生明显的振动和噪声问题,其频率与燃油车相比有所不同。对于电动汽车,电机扭矩波动大,速度快,是一个主要激励源。此外,电驱系统与半轴的匹配不好也会产生抖动问题,而其中的万向节就是一个很重要的部件。S Richter 和JW Biermann 研究了试验台对不同半轴移动节的轴向力和垂向力,阐述了轴向派生力产生的机理[1]。上海交通大学郭常宁教授研究了等速万向节驱动轴总成圆周间隙和三叉销式万向节球环与滑槽间的摆角对NVH 的影响[2-3]。武汉理工大学张得来对驱动轴节型效率进行研究,目前主机厂常用的移动节主要是GI 节, 而高效率的移动节则是AAR 节型[4]。目前的研究大多是采用理论计算和仿真方法对力进行研究。而半轴移动节对NVH的影响则研究较少,尤其是缺少对电驱系统台架试验的直接研究。
本文针对电动车电驱系统的轴向抖动问题,通过试验方法进行深入研究。首先结合模态识别的方法确定电驱系统轴向抖动的原因。然后针对驱动半轴的不同安装角度和节型分别进行试验, 分析角度和节型对电驱系统轴向抖动的影响, 进而提出解决该问题的设计建议。
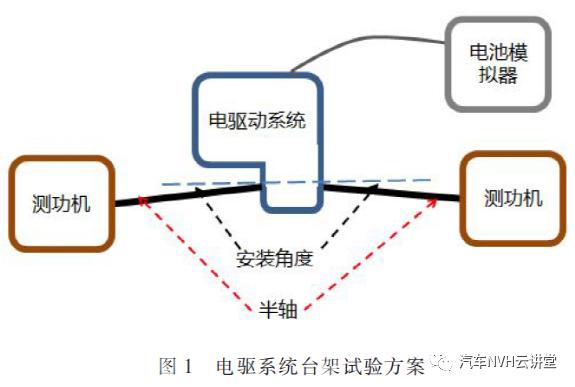
为了明确研究电动车电驱动系统本身的轴向抖动问题,避免整车部件的影响,将电驱系统从整车上拆下,放置到台架上进行振动试验。台架试验方案如图1 所示。
电驱系统通过左右半轴分别与两个测功机相连。电池模拟器可以模拟车载电池,为电驱系统提供380V 高压电。通过控制系统使电驱系统输出扭矩,而测功机则可以模拟实际路面负载, 以此来模拟电驱系统的实车工况进行试验。在电驱系统本体上布置振动传感器,如图2 所示。
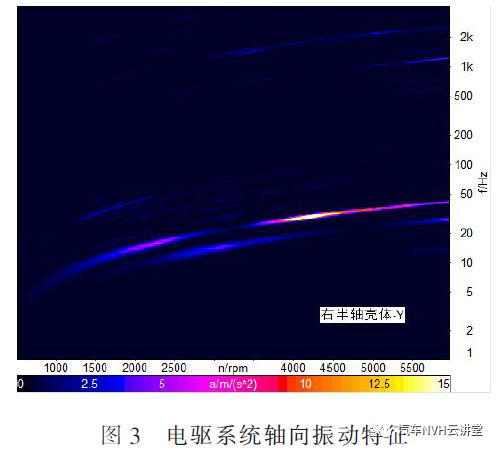
针对整车出现的加速工况轴向抖动问题, 在台架上控制电驱系统运行加速工况, 测试电驱系统本体的振动。分析其振动特征,发现沿半轴轴向方向抖动特征明显,其加速过程振动频谱图如图3 所示。
结果表明在电机4300rpm 附近, 电驱系统出现约30Hz 的明显轴向抖动。由频谱图可看出,在30Hz附近存在结构模态。该结构模态被0.42 阶的阶次激励激发, 引起共振。由于该电驱系统的总速比为7.15,其半轴转频阶次为:
而半轴移动节处一般有三轴销, 所以会产生半轴转频的三倍频,其阶次为:
由此可知, 电驱系统的轴向抖动是由半轴的阶次激励激发起某阶结构模态而引起的。
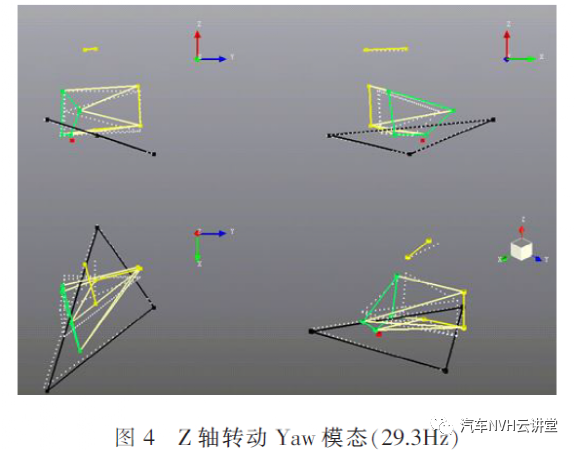
为了确定电驱系统轴向抖动是由哪阶模态引起,在台架上对电驱系统进行模态测试与识别。通过电驱系统的台架模态测试, 识别出其六阶刚体模态,刚体模态频率分布在10Hz-50Hz 之间。人体对该频率范围的振动比较敏感。其中电驱系统绕Z 轴转动(Yaw)模态频率为29.3Hz,与第1 节加速试验工况得到的30Hz 左右的轴向抖动频率一致。
提取电驱系统Yaw 模态振型如图4 所示。可以看出整个电驱系统绕Z 轴转动。由图1 可知,电驱系统整体结构类似于三角形, 与半轴连接的差速器位置相当于三角形一个顶点。当电驱系统出现绕Z 轴转动的振型时,差速器附近就会出现Y 向振动,也就是问题体现的轴向抖动。
根据以上试验分析可知, 电驱系统加速时出现的轴向抖动问题是由于半轴转频的三倍频阶次激励激发起电驱系统的Yaw 模态,进而产生剧烈抖动。
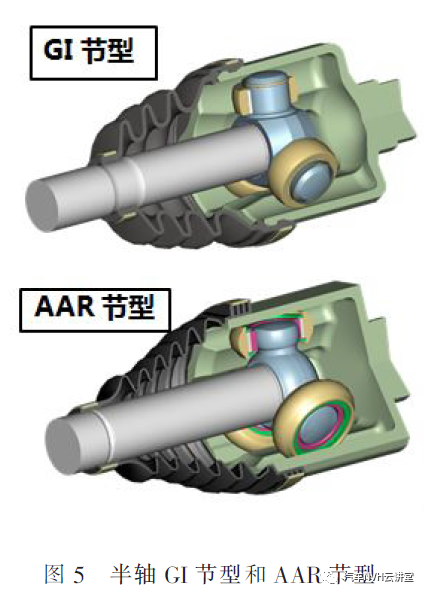
一般对于振动问题, 可以从控制激励源头或优化路径来进行改善。但对于上述电驱系统轴向抖动问题,Yaw 刚体模态是一直存在的,即使通过结构优化改变了其模态频率, 仍然会在相应频率下出现抖动问题。因此可以考虑控制其半轴阶次激励。从两个方向进行研究,一是调节半轴的安装角度,如图1 所示;二是改变半轴的节型,如图5 所示。
GI 节型结构较简单,成本低。而AAR 节型结构复杂,成本高。据已有文献研究可知,AAR 节型传动效率比GI 节高1%~2%[5],而且其轴向派生力更小。
本文对半轴激励的影响因素进行了试验研究,电驱系统转速1000 -6000rpm, 扭矩从25NM 到200NM。半轴节型包括GI 节型半轴和AAR 节型半轴。AAR 节型半轴对应安装角度从3°增加到13°。根据以往研究,GI 节型不适用于太大安装角度, 所以其安装角度从3°增加到10°。
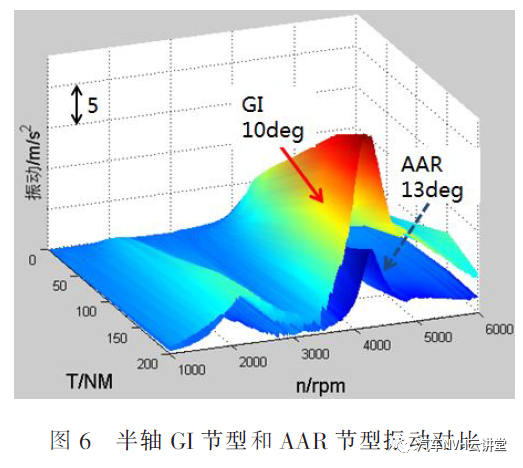
针对以上加速工况,提取半轴转频的三倍阶次轴向振动,首先将GI 节型和AAR 节型的最大角度的结果进行对比,如图6 所示。结果表明,随着扭矩增大,电驱系统的轴向振动幅值均有所增大。GI节半轴10°时的振动远大于AAR 节半轴13°时的振动。
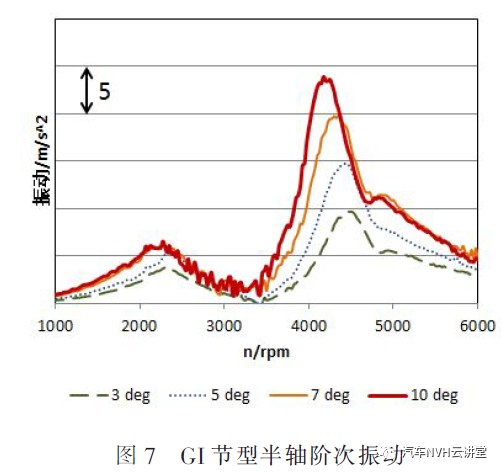
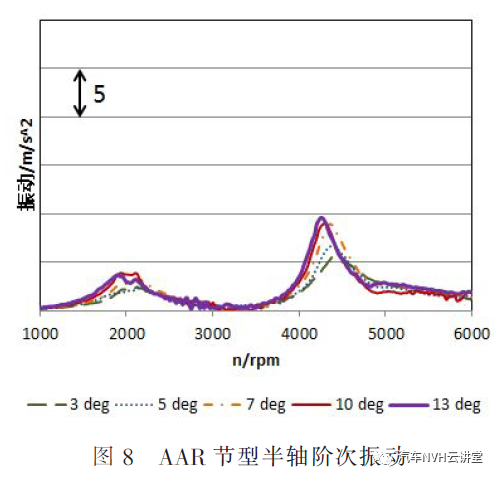
为了进一步深入对比, 提取半轴转频三倍频的阶次曲线,即0.42 阶。GI 节型不同角度的振动曲线如图7 所示。AAR 节型不同角度的振动曲线如图8所示。
由结果可知,GI 节型半轴的阶次振动对安装角度极其敏感, 其振动幅值随半轴角度的增大而迅速增大。当安装角度从3°增大到10°时,半轴阶次振动幅值增大了2~3 倍。而AAR 节型半轴的阶次振动对安装角度不敏感, 其振动幅值随半轴角度的增大仅有略微增大。当安装角度从3°增大到13°时,半轴阶次振动幅值仅增增大30%-40%。
再进一步对比GI 节型和AAR 节型的半轴阶次振动, 结果表明,AAR 节型半轴安装角度为13°时,其振动幅值仅仅与GI 节型半轴角度为3°时的振动水平相当。
通过以上研究可以知道,在前期设计阶段,为了减小半轴阶次激励引起的电驱系统抖动, 应尽量减小半轴的安装角度。若由于结构布置限制而必须有较大的安装角度时, 应尽量避免使用GI 节型的半轴。尽可能选用AAR 节型的半轴,以此可以减小电驱系统轴向抖动引起的整车抖动问题。
本文针对电驱系统的加速工况轴向抖动问题,首先基于台架试验进行了原因识别, 然后从降低激励的角度,对其影响因素进行了试验研究,主要研究了半轴的节型和安装角度对阶次振动的影响。并根据研究结果对该问题的优化设计给出了策略建议。
1)电驱系统加速工况的轴向抖动,是由于半轴的阶次振动激励激发了电驱系统的Yaw 刚体模态而引起的;
2)GI 节型半轴的阶次振动对安装角度极其敏感, 其振动幅值随半轴角度的增大而迅速增大;而AAR 节型半轴的阶次振动对安装角度不敏感,其振动幅值随半轴角度的增大仅有略微增大;
3)AAR 节型半轴的阶次振动远小于GI 节型半轴的阶次振动。AAR 节型安装角度为13°时,其振动幅值仅仅与GI 节型半轴角度为3°时的振动水平相当;
4)电动车电驱系统布置设计时,为避免轴向抖动问题,应尽量减小半轴的安装角度,若由于结构空间限制而必须有较大的安装角度时, 应尽量使用AAR 节型的半轴。















获取更多评论