奥迪A8、宝马7系和特斯拉的智能驾驶及整车电子电气架构
文章来源: 旺材汽车电子
发布时间:2021-07-15
奥迪A8、宝马7系和特斯拉的智能驾驶及整车电子电气架构。
奥迪A8第5代搭载了L3级别的自动驾驶系统,是世界上首款实现L3级别自动驾驶的量产车。奥迪官方将该自动驾驶系统命名为“奥迪AI交通拥堵驾驶系统“,并加入了一个“Audi AI”操作按钮来开启自动驾驶功能,它允许车辆在低于时速60km的情况下由系统完全接管驾驶。届时,汽车将自主完成加速、制动、转向等驾驶操作。奥迪官方强调,驾驶员将不再需要在这个时候保持对车辆情况的监控,而是可以双手离开方向盘,真正实现车辆在特定场景下的完全自动驾驶。如果车辆判断这一情况下不能自主完成安全驾驶,会提醒驾驶员接管方向盘。
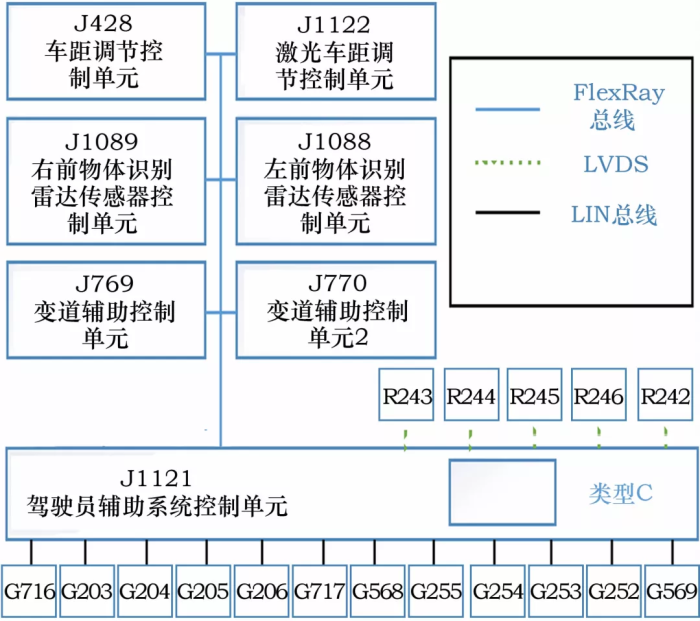
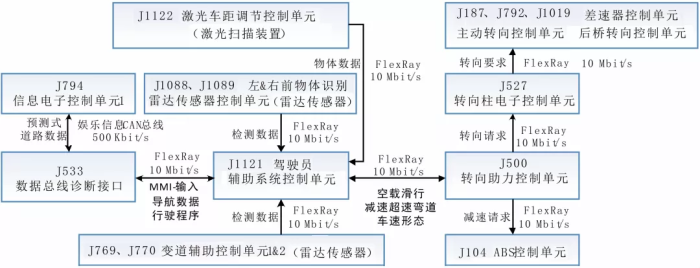
传感器配置:图1展示的是的驾驶员辅助系统控制单元J1121和所有传感器。传感器分为两类:一类传感器数据由控制单元J1121直接读取;另一类型传感器本身就是控制单元,它们会通过FlexRay总线把测量数据提供给控制单元J1121。
图1 奥迪A8传感器位置
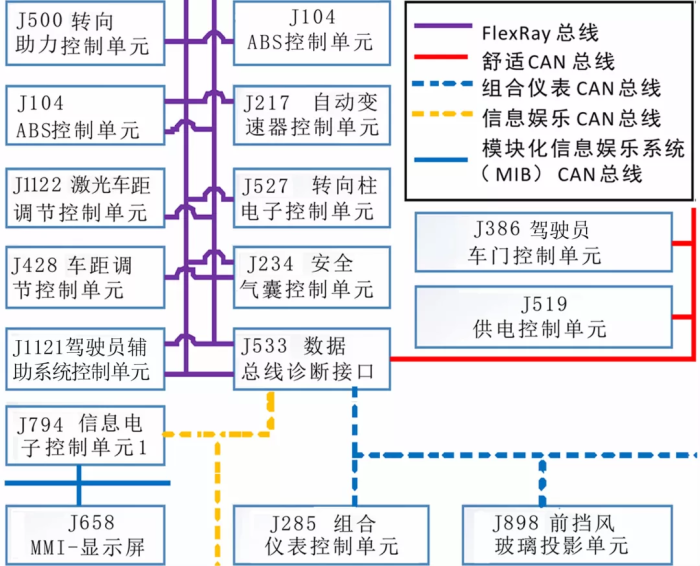
其中,G203。G206为后部驻车辅助传感器,G252~G255为前部驻车辅助传感器,G568~G569为前部自动泊车辅助传感器,G716~G717为后部自动泊车辅助传感器,R242为驾驶员辅助系统正面摄像头,R243~R246为周围环境摄像头。图2展示的是自适应驾驶辅助系统用到的控制单元。
图2 自适应驾驶辅助系统用到的控制单元
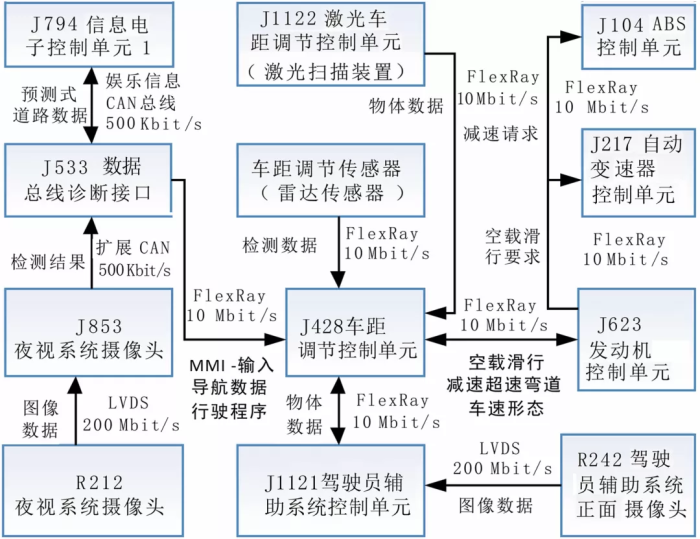
使用车辆导航系统预测出的道路数据调节车辆的纵向动力学状态,从而实现高效驾驶并能减轻驾驶员的负担,如图3所示。
图3 预测式高效辅助系统原理框图 (纵向调节)
根据MMI一设置,车速限制、道路形态(弯道、十字路口等)以及地形(上坡、下坡)都集成在ACC一调节过程中了。
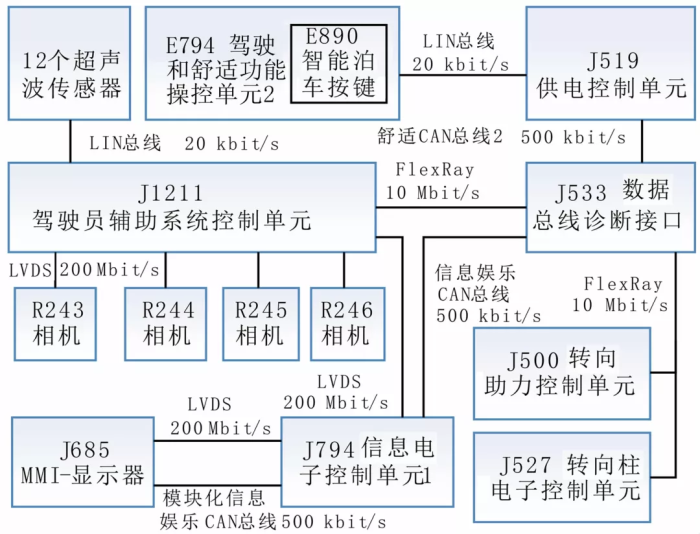
智能泊车辅助系统在下述泊车情形时为驾驶员提供帮助:倒车进入纵向停车位:前行退出纵向停车位;在先驶过横向停车位后前行进入横向停车位;未驶过横向停车位时前行进入横向停车位;倒车进入横向停车位。智能泊车辅助系统原理框图如图4所示。
图4 智能泊车辅助系统原理框图
横向辅助(也可称交叉路口辅助或十字路口辅助)是一种新型驾驶员辅助系统,首次用于Audi A8(车型4N)上,该系统可帮助驾驶员避免与本车前部横向通过的车辆相撞。横向辅助系统在本车前部横向通过的车辆因视野受限而稍晚才能被驾驶员看到时为驾驶员提供帮助。这样的视野受限情形比如有:十字路口以及穿行窄出口时。另外,在复杂交通情形时,比如驾驶员因注意看其他交通参与者而忽略了横穿的交通参与者时,该系统也能为驾驶员提供帮助。横向辅助系统原理框图如图5所示。
图5 横向辅助系统原理框图
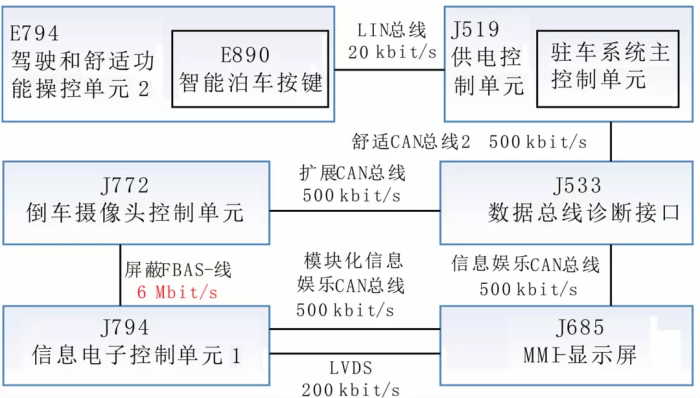
奥迪A8上的倒车摄像头是少数几个不使用驾驶员辅助系统控制单元J1121的系统之一。摄像头广角图像的修正、摄像头的校准以及摄像头上的辅助线投射,均由专用的倒车摄像头控制单元J772来完成。
倒车摄像头的图像经屏蔽的FBAS一线直接被送到信息电子控制单元1-J794,图像从这里再经2根屏蔽的LVDS一线传至MMI一显示器J685,从而显示出图像。倒车系统原理框图见,图6。
图6 倒车系统原理框图
1.6 第5代A8(4N)与第4代A8(4H)对比
第5代奥迪A8(4N)相较于第4代奥迪A8(4H)主要扩展了驾驶员辅助驾驶的范围,且能在更多情形时通过最新的技术为驾驶员提供帮助。主要体现在以下几个方面。
1)配备了新的横向辅助系统,该系统在因视野受限(比如十字路口以及穿行窄出口)时为驾驶员提供帮助。具体帮助方式是发出各种警报来提醒驾驶员,以避免本车与前方横向来车发生碰撞等。
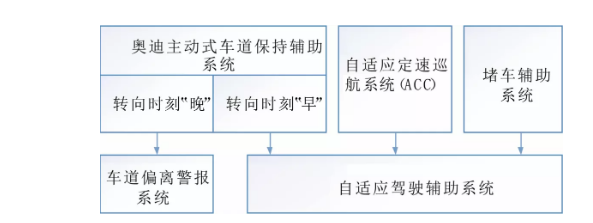
2)首次采用了自适应驾驶辅助系统,该系统能在车速0~250km/h之间时帮助驾驶员同时进行车辆横向控制和纵向控制。自适应驾驶辅助系统是将以前多个驾驶员辅助系统(这些系统在别的奥迪车型上早就使用了)合成为一个系统。使用自适应驾驶辅助系统,首次在车速0~250 km/h之间可同时进行车辆横向控制和纵向控制。所谓纵向控制,指车辆的加速和制动;所谓横向控制,指车辆的转向。但是在横向控制时驾驶员必须一直把手放在方向盘上。Audi A8 4N添加自适应驾驶辅助系统如图7所示。
图7 Audi A8 4N添加自适应驾驶辅助系统
3)奥迪公司在Audi A8(车型4N)上首次使用了驾驶员辅助系统中央控制单元,该控制单元是多个辅助系统的主控制单元。这个中央控制单元在售后服务中被称作驾驶员辅助系统控制单元J1121,该控制单元取代了数个我们熟知的控制单元(其功能现在已集成到J1121内了)。
多个传感器直接连接在驾驶员辅助系统控制单元J1121上,不再使用车上的总线系统。传感器数据的处理是在控制单元J1121内进行的,这些数据涉及驾驶员辅助系统正面摄像头和4个周围环境摄像头。控制单元J1121还通过FlexRay总线接收其它传感器发来的数据。
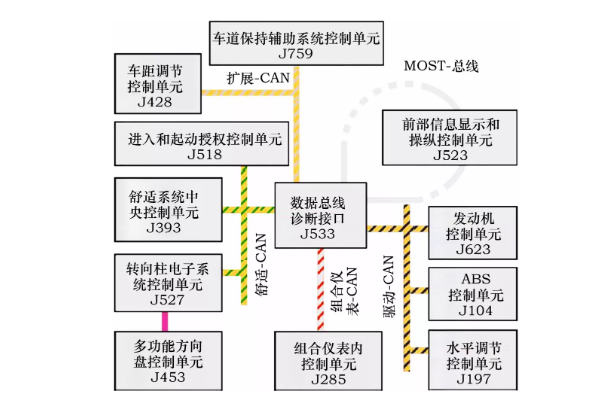
一个控制单元内现在就可使用所有传感器数据,就可为驾驶员提供车辆周围高品质测量数据功能,另外这也是各种驾驶员辅助系统继续提高性能的一个基础。Audi A8 4N J759带摄像头框架图见图8。
图8 Audi A8 4N J759带摄像头
宝马7系整合主动车距定速控制系统、主动车道维持辅助、拥塞交通辅助系统、车侧防撞辅助、前方车流警示、路口车流防撞辅助、闪避转向辅助等功能,使驾驶可以在不需控制油门的情况下跟前车维持距离,并且能在偏离车道时自动修正方向盘将车辆导回正常路线,甚至还可侦测前方车流与路口车流,主动介入控制制动及转向来避免碰撞危险。2016款7系轿车将支持远程遥控停车/出车位。
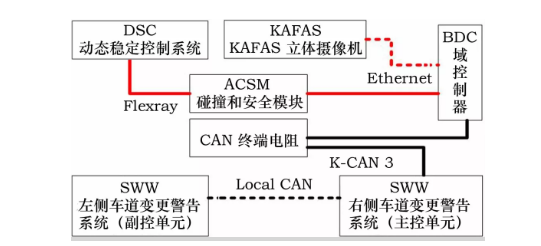
通过车道偏离警告系统识别出偏离车道情况,借助振荡执行机构产生相应方向盘振动,并通过相应警告灯发出车外后视镜内的视觉警告时触发,车速范围在70~210km/h。车道偏离警告系统原理框图如图9所示。
图9 车道偏离警告系统原理框图
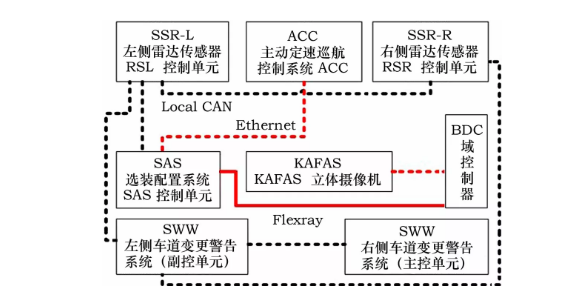
首次将其应用于F01/F02车辆,车道变更警告系统SWW控制单元(传感器)位于后保险杠下方。车道变更警告系统SWW控制单元(主控单元)位于右侧,车道变更警告系统SWW2控制单元(副控单元)位于左侧。一些传感器能够根据天气情况在最远70m距离内进行有效探测。识别出车辆且启用系统时,通过车外后视镜内的相应显示告知驾驶员情况。车道变更警告系统原理框图见图10。
图10 车道变更警告系统原理框图
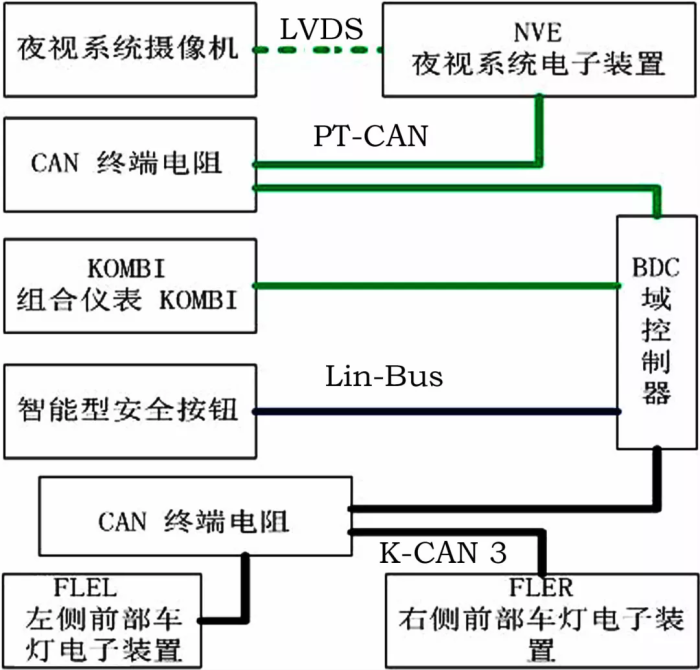
集成在BMW肾形格栅内,夜视系统可在夜间最佳条件下识别出最远约100m处的行人和动物,在5℃以下温度范围内会接通一个加热装置,从而避免摄像机结冰。行人识别最远约100 m,大型动物识别最远约150 m,中型动物识别最远约70 m。夜视系统原理框图见图11。
图11 夜视系统原理框图
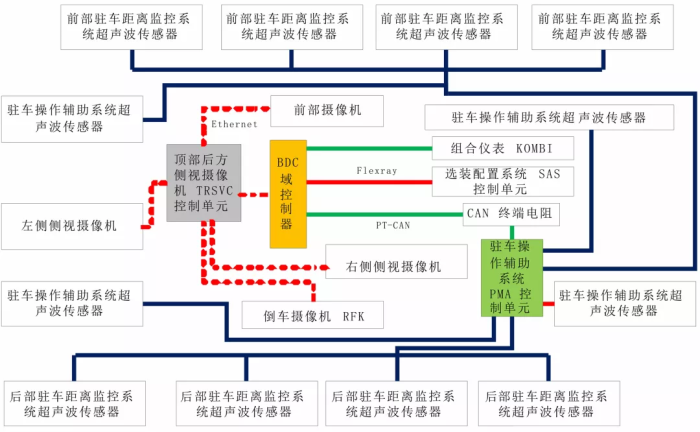
驻车操作辅助系统PMA可以测量停车位大小并根据测量结果确定停车位是否够大,前部保险杠内的2个附加超声波传感器负责在行驶期间测量停车位,通过后部保险杠饰板内的4个超声波传感器和前部保险杠饰板内的另外4个超声波传感器测量与障碍物的距离,通过位于后部保险杠内的另外2个超声波传感器在停车入位过程中准确探测横向停车位。通过附加PDC传感器测量与所识别目标的距离。驻车和倒车系统原理框图见图12。
图12 驻车和倒车系统原理框图
2.5 第6代G11/12与第5代FOI/02对比
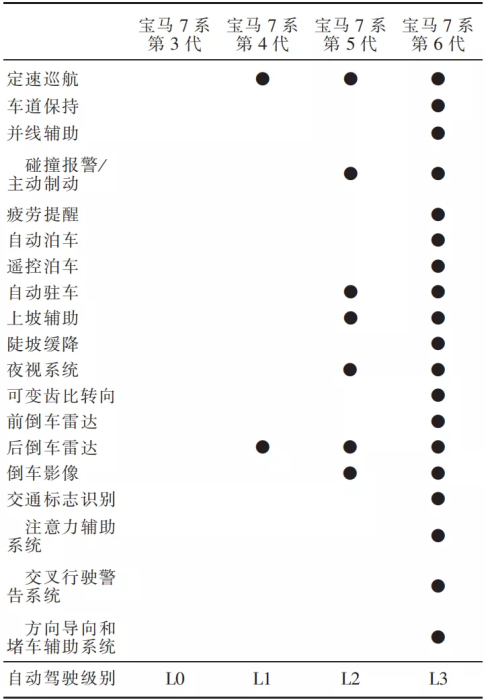
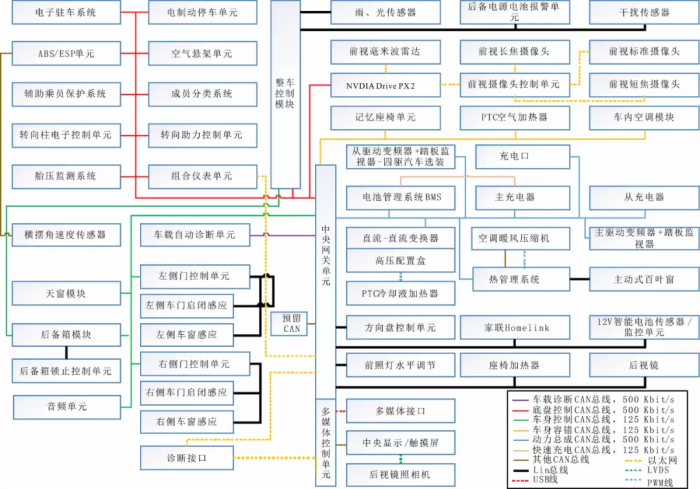
第6代7系宝马在第5代的基础上增添了如车道偏离警告系统、交通标志识别系统、环视系统、交叉行驶警告系统等智能辅助驾驶功能,同时更多地在娱乐、摄像机信号图像传输等模块使用高带宽的以太网代替原来的LVDS传输。
中央网关模块ZGM集成在BDC内,它可以说是控制单元中的控制单元,因为BDC内ZGM的工作方式就像是一个独立的控制单元。ZGM将所有主总线系统彼此连接起来,将不同协议和速度转换到其他总线系统上。通过ZGM可经过以太网将有关控制单元的编程数据传输到车辆上。
表1 第3~6代辅助驾驶系统配置及智能驾驶分级
特斯拉Model S有7种类型的控制器局域网(CAN)总线。除2条总线外,所有的总线都连接到了中央网关。各个控制器使用这些总线在不同系统间传递数据。这些总线分别是底盘、车身、车身容错(Body—Fault toler-ant)、动力总成、车载诊断II(On—Board Diagnostics II,OBDII)、快速充电(Not connected to GTW)、稳定控制(Not connected to GTW)。
Model S有5种LIN总线,它们具有以下功能:LIN 1——方向盘控制单元;LIN2——12 V智能电池传感器和监控单元;LIN 3——座椅加热器和后视镜;LIN 4——保留供将来使用:连接到整车控制模块BCM的LIN总线传输来自左右车门传感器的数据,因此车身控制器可以确保挡风玻璃刮水器、灯和HVAC系统的正确操作。特斯拉中央网关单元的媒体控制器有USB、e—net、line等线连接。
特斯拉Medel S7控制器局域网总线框图见图13。
图13 特斯拉Medel S7控制器局域网总线框图
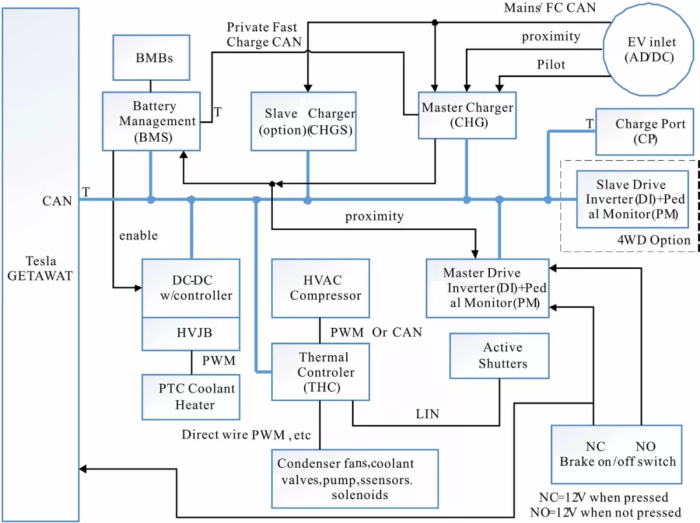
动力总成总线连接以下控制器:电池管理系统(Battery Management System,BMS)、主充电器(Mastercharger)、从充电器(Slave charger)、充电12(Chargeport)、直流一直流变换器(DC—DC converter)、热管理系统(Tesla Thermal Controller,THC)、主驱动变频器(Master drive inverter);快速充电总线连接以下控制器:电池管理系统(Battery Management System,BMS)、主充电器(Master charger)。动力总成与快速充电总线图见图14。
图14 动力总成与快速充电总线图
动力总成与快速充电CAN在2个节点上都具有“T”。这表示总线的2个终止节点每个都为CAN总线增加120Ω。终止节点位于每条总线的末端,以帮助反映消息。从每个末端测量CAN总线的电阻值均为60Ω,这是由于2个120Ω在末端并联的原因。
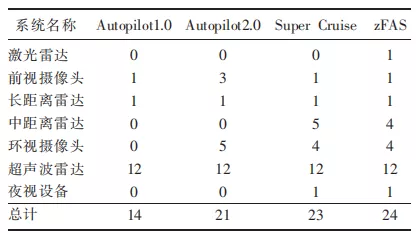
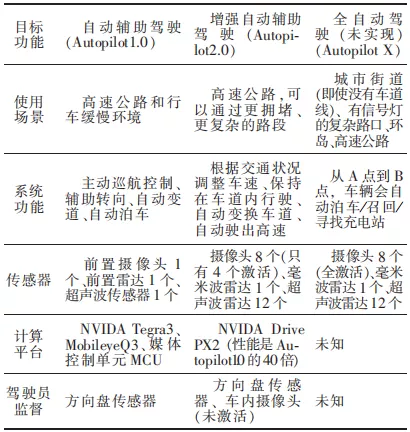
Autopilot1.0(现已很少使用)、Autopilot2.0(Tesla Model S)、Super Cruise(Cadillac CT6)、以及zFAS(AudiA8)传感器比较如表2所示。
表2 智能辅助驾驶系统传感器配置
在上述传感器中,Autopilot2.0(Tesla Model s)目前8个摄像头中,只有4个摄像头用于智能辅助驾驶,分别为3个前视摄像头(正常、长焦、广角)与一个后置摄像头,无法像Super Cruise和zFAS一样在车身两侧形成“环视+超声波”的“双保险”。zFAS(Audi A8)不用拥有最多的传感器,更添加了激光雷达,这是Audi A8能够先于TeslaModel S/X、Cadillac CT6成为全球首款自动驾驶level 3级别的量产车的重要原因之一。
3.3 Tesla智能辅助驾驶系统Autopilot发展及展望
在总线系统上,Tesla智能辅助驾驶系统Autopilot有着比较显著的变化。在Autopilot 1.0中,所有总线几乎都是通过CAN或LIN信号传输,在Autopilot 2.0中,控制器已经开始预留LVDS和以太网接口,Autopilot2.5并对这些接口进行了进一步优化,Tesla智能辅助驾驶系统Autopilot进化史如表3所示。
表3 Tesla Autopilot进化史
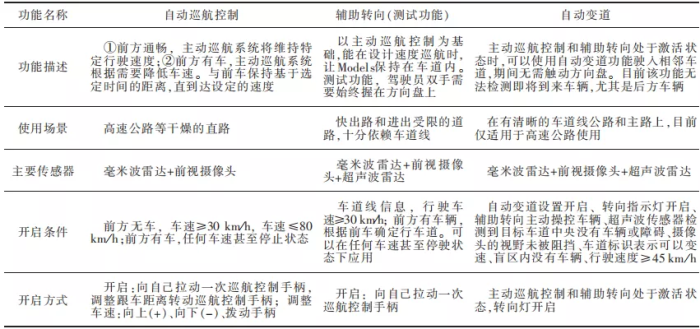
3.4 Tesla Autopilot 2.0功能分析
表4 Tesla Autopilot2.0主要功能分析
如表4所示,Autopilot2.0核心内容由主动巡航控制、辅助转向、自动变道构成,可同时与车道辅助、防撞辅助、车速辅助等功能搭配使用。其中,主动巡航控制可以自动对车辆进行纵向控制,简单来说就是开启后系统接管了制动器,但驾驶员仍然需要手动控制方向盘。辅助转向提供的自动横向控制,取代了手动控制方向盘的操作。








正在获取数据......