纯电动汽车动力系统选型匹配与仿真
本文以某纯电动汽车作为研究对象,依据整车设计目标对其动力总成系统进行选型匹配,并利用Cruise软件进行整车仿真模型的建立及仿真分析,验证选型匹配方案的合理性。
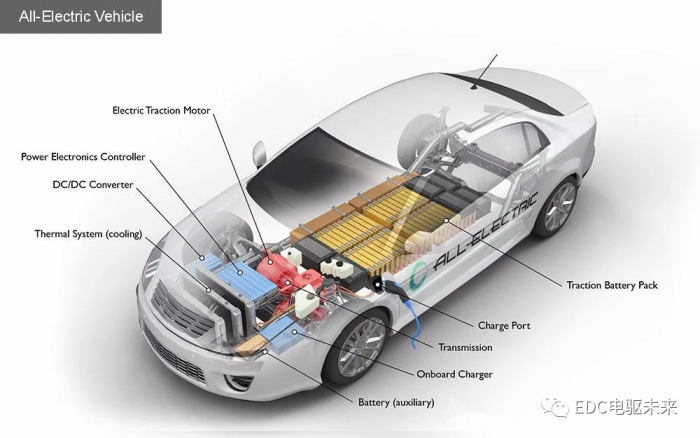
纯电动汽车的动力总成系统主要由驱动电机、动力电池、传动系统以及控制系统构成。其动力总成系统结构简图如下图1所示。
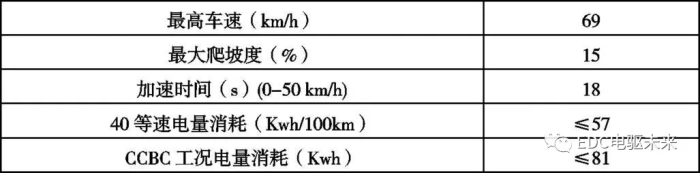
为了对纯电动汽车动力总成系统进行选型及匹配,应明确整车参数及所要求的性能指标。整车参数及性能指标如表1-2所示。
1.1 驱动电机选型计算
1.1.1最高转速及基速
最高车速可由以下公式计算得出:
 (1)
(1)
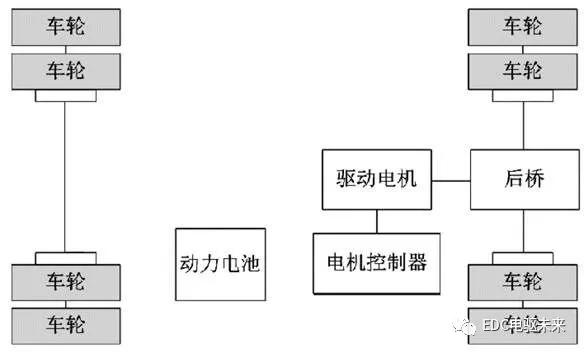
图1 纯电动汽车动力总成系统结构简图
可得到电机的最高转速为nmax=2274.04r/min;电动机的最高转速与额定转速的关系可用扩大恒功率区系数β来表示,根据关系式可得电机的基速n0:
 (2)
(2)
因此,取最高转速和基速分别为2500 r/min和780r/min。
表1 纯电动汽车整车参数
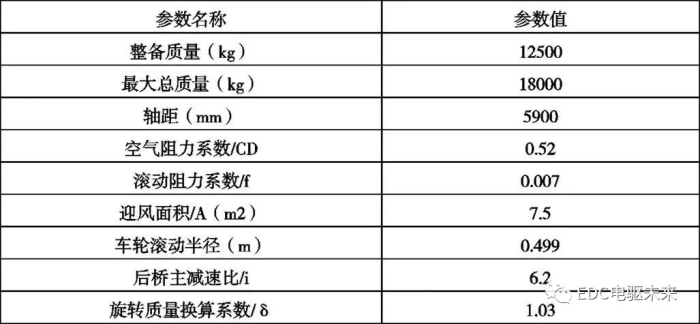
表2 整车性能指标
1.1.2功率匹配
对于驱动系统峰值功率需求主要考量最高车速、某一车速下满足最大爬坡度以及原地起步加速时分别对应的峰值功率需求。
(1)当车辆满载且运行在平坦路面时,计算其最高车速所对应的电机峰值功率需求:
 (3)
(3)
式中:
Pm1——驱动电机功率需求(kW);
vmax——最高车速(km/h);
ηt——传动系统效率;
g——重力加速度,g=9.8 m/s2。
(2)在某一车速下满足最大爬坡度要求时所需的功率:
 (4)
(4)
式中:
αmax——最大坡度角(°);
vp——爬坡时的车速,这里取vp=20km/h。
(3)纯电动汽车在从0到50km/h时电机所需要的峰值功率可由公式(5)得到:
 (5)
(5)
式中:
v——加速过程中的实时车速;
δ——旋转质量系数。
公式的第一二项分别代表纯电动汽车克服滚动阻力和空气阻力时所需要的平均功率,第三项代表反映车辆加速性的功率需求。
综合考虑纯电动汽车满足最高车速、最大爬坡度和加速等各种情况下的功率需求,得到驱动电机的峰值功率的要求,驱动电机的峰值功率为:
 (6)
(6)
根据现有平台资源,取峰值功率为160kw,额定功率为100kw。
1.1.3转矩确定
根据电机的额定功率和额定转速可以得到电机的额定转矩,计算公式为:
 (7)
(7)
式中,T0表示驱动电机的额定转矩(N·m),则驱动电机的峰值转矩是:
 (8)
(8)
式中:
Tmax为驱动电机的峰值转矩(N·m);
λp为电机的过载系数,常取3~4。
经过以上分析,选定驱动电机参数,见表3。
表3 驱动电机参数

1.2 动力电池组选型计算
动力电池组的最大输出功率应满足整车驱动及附件所需,计算公式如下:
 (9)
(9)
式中:
Pbmax——动力电池组最大输出功率;
Pmmax——驱动电机的最大输出功率;
Pas——车辆电动附件部分的平均功率;
ηm——驱动电机的效率,取0.96;
ηme——动力电池组放电效率,取0.95。
由上述公式计算得到,动力电池组所需输出的最大功率为239.97 kW。
另外,整车续驶里程是评价纯电动汽车的一大重要指标,纯电动汽车所配备的电池组容量越大,续驶里程越长。然而大容量的电池组会影响整车的整备质量,增加整车电池包成本。所以应该合理匹配整车动力电池组容量,从而提升整车性能。
电池组电压取537.6V,采用等速法(40km/h)并利用续驶里程设计目标值对电池容量进行反向计算。具体计算方法如下:
已知续驶里程设计目标值D=160km,整车动力系统传动效率ηT,驱动系统效率ηe,动力电池组放电深度ηb,动力电池组总容量E(kWh),该纯电动汽车在40km/h满载稳定行驶时输出功率为P40=20.83(kW),根据能量守恒定律,可得到如下计算公式:
 (10)
(10)
则电池的容量为:
 (11)
(11)
代入各项数据,由上式计算得,电池组总容量E =102.62 kWh,根据现有资源选取储能装置总储电量为115.92 kWh。
2.1 仿真模型建立
本文采用Cruise软件进行整车仿真模型的建立,灵活的模块化理念使得Cruise可以对任意结构形式的汽车传动系统进行建模和仿真,同时完善的算法程序保证了较快的运算速度和计算精度。
依据纯电动客车动力的传输路线可以建立车辆的仿真模型,并输入各部件所需的参数,如图2所示。
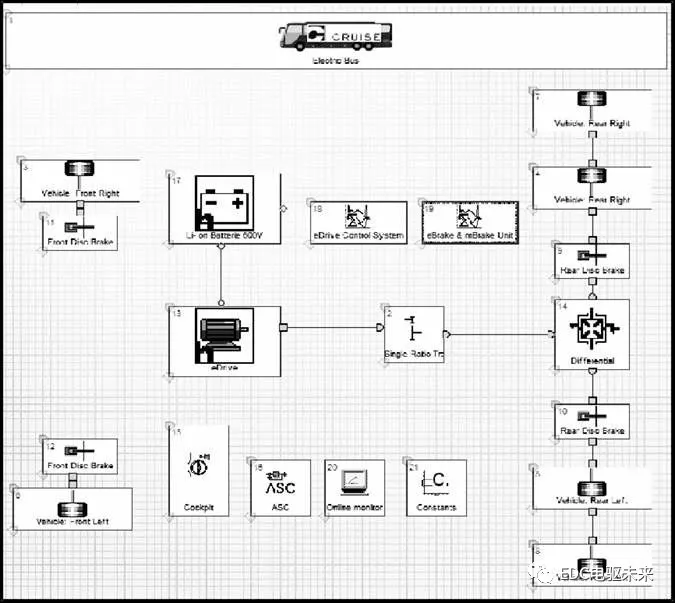
图2 纯电动车仿真模型
2.2 性能仿真分析
2.2.1整车动力性分析
纯电动汽车的动力性评价指标为最高车速,某一车速下的最大爬坡度和起步加速时间。
(1)整车最高车速及加速时间分析
利用Cruise计算任务中的全负荷加速性能任务计算了纯电动汽车在加速过程中的最高车速和加速时间。如图3所示。
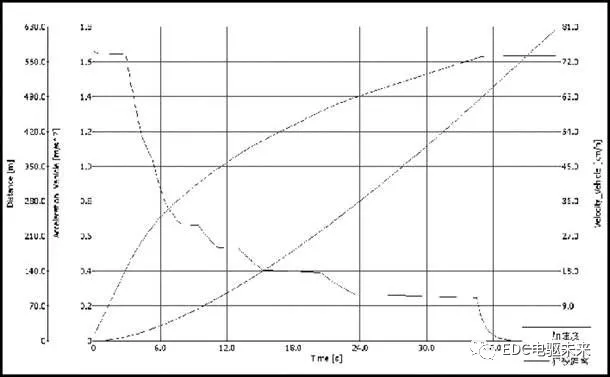
图3 加速过程中车速、加速度与距离的关系图
由图中可以得到纯电动汽车最高车速可达到73 km/h,符合设计目标值。同时,由图可得到该纯电动汽车从静止加速到50 km/h的加速时间为14.12s,小于设计的目标值18s,故满足要求。
(2)最大爬坡度分析
尽管在市区路况下不存在如同乡村公路那样非常极端的陡坡,但是随着城市化水平的提高,交通基础建设的拓展,市民对高架桥以及室内环线或高速的依赖性增强,因此即使是在城市中也必不可少的存在高架桥的上下坡,而此时则必须考虑车辆的爬坡性能。设计不当导致爬坡能力的不足会对交通线的畅通带来不必要的麻烦,并且也潜在溜车等交通事故的发生。因此,检验车辆的最大爬坡度是一个非常重要的环节。
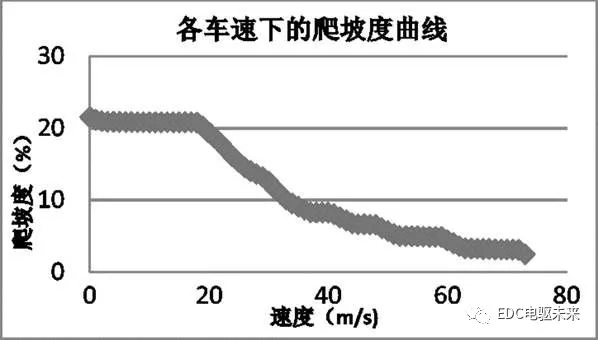
图4 各车速下纯电动客车的爬坡度
图4显示了各个车速下纯电动汽车的爬坡能力,我们可以得出,当车速为20 km/h时,最大爬坡度为19.34%,满足设计的性能要求。
2.2.2整车经济性分析
纯电动汽车的经济性评价指标为续驶里程和电耗。本文分别以40km/h等速和CCBC两种工况条件对纯电动汽车进行仿真分析,计算两种工况下的百公里能耗和续驶里程。
(1)40km/h等速工况下的百公里能耗和续驶里程分析
图5反映了在40km/h等速行驶工况下电池SOC值与行驶距离的关系。经计算,在动力电池组放电深度为85%的条件下,40km/h等速工况百公里能耗为54.61kwh/100km,续驶里程值大于设计的目标值160km,满足设计要求。
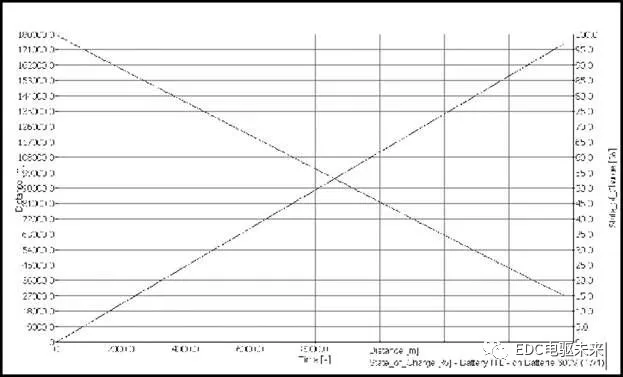
图5 40km/h等速行驶工况下电池SOC值与行驶距离的关系图
(2)CCBC工况能耗分析
中国典型城市公交循环即CCBC工况对于城市客车的能耗分析具有深刻意义,其车速和时间关系如图所示。
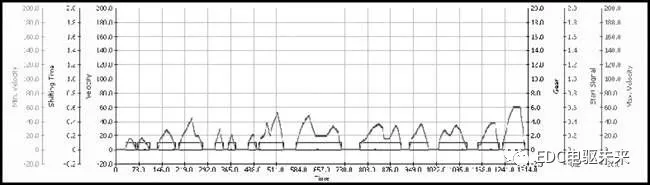
图6 CCBC行驶工况
一个CCBC行驶工况的总时间为1314s,运行距离5.8km。在一个行驶工况时间内,电池的SOC值及消耗电量如下图7-8所示。
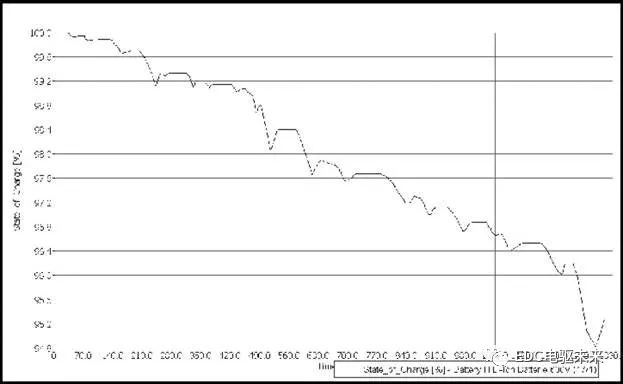
图7 CCBC行驶工况下电池SOC值变化图
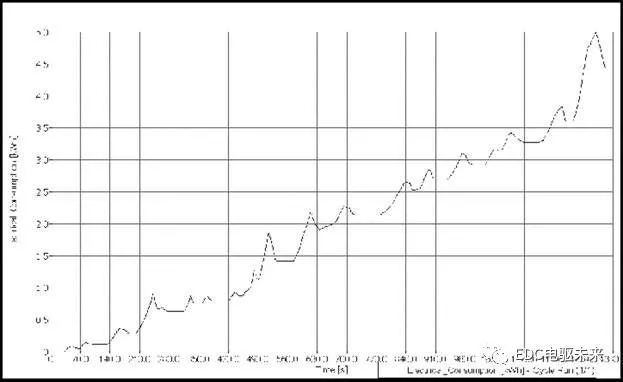
图8 CCBC行驶工况下能耗值变化图
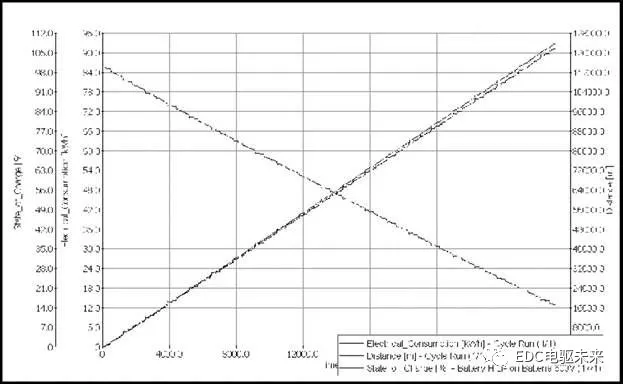
图9 多个CCBC行驶工况循环下能耗与电池SOC值变化图
图9为多个CCBC行驶工况循环下,电池SOC值变化量、距离和能耗的关系图。经综合计算,CCBC工况下的百公里能耗为73.83 kwh/100km,能耗小于要求的81 kwh/ 100km,续驶里程达到123km,符合设计要求。
为了验证动力总成系统参数匹配的正确性及仿真模型的合理性,对纯电动汽车进行了动力性及经济性试验。将样车的实测试验结果与仿真数据进行对比,如表4及表5所示。
表4 动力性实测与仿真结果对比

表5 动力性实测与仿真结果对比

通过仿真与实测值对比表可发现仿真与实测值相差不大,误差值在可接受范围内。
本文以某纯电动汽车作为研究对象,首先进行了动力总成系统的选型匹配计算,并利用Cruise软件进行了整车仿真模型的建立。基于仿真模型进行了动力性和经济性的计算分析。结果表明,整车参数匹配结果合理且模型具有较高的正确性,为后续的开发优化奠定了良好的基础。












![]()
2001-2009 Vogel Industry Media版权所有 京ICP备12020067号-15 京公网安备110102001177号


获取更多评论