一文了解目前所有的视觉三维重建技术
三维重建经过数十年的发展, 已经取得巨大的成功。基于视觉的三维重建在计算机领域是一个重要的研究内容, 主要通过使用相关仪器来获取物体的二维图像数据信息, 然后, 再对获取的数据信息进行分析处理, 最后, 利用三维重建的相关理论重建出真实环境中物体表面的轮廓信息。基于视觉的三维重建具有速度快、实时性好等优点, 能够广泛应用于人工智能、机器人、无人驾驶、SLAM (Simultaneous localization and mapping)、虚拟现实和3D打印等领域。三维重建技术的分类方法如下图所示:
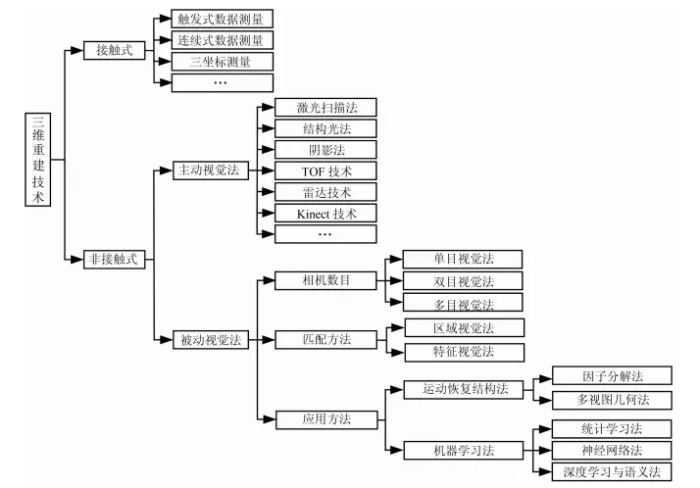
三维重建技术的分类
三维重建技术优缺点对比一览

基于主动视觉的三维重建技术
基于主动视觉的三维重建技术主要包括激光扫描法、结构光法、阴影法和TOF技术、雷达技术、Kinect技术等。
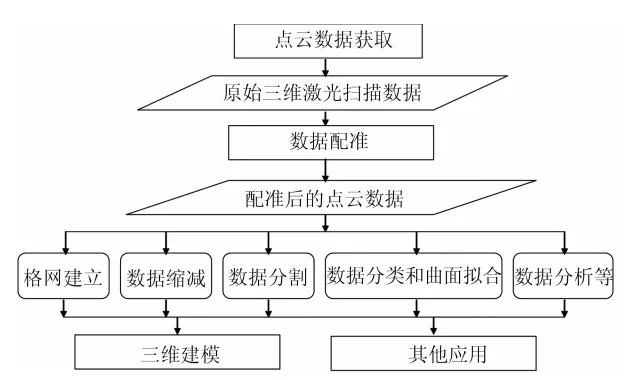
1、激光扫描法
激光扫描法其实就是利用激光测距仪来进行真实场景的测量。首先, 激光测距仪发射光束到物体的表面, 然后, 根据接收信号和发送信号的时间差确定物体离激光测距仪的距离, 从而获得测量物体的大小和形状。
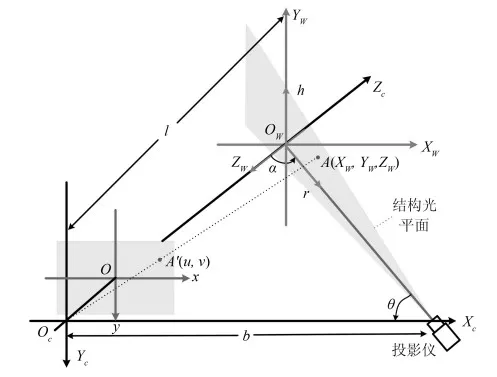
2、结构光法
结构光法的原理是首先按照标定准则将投影设备、图像采集设备和待测物体组成一个三维重建系统; 其次, 在测量物体表面和参考平面分别投影具有某种规律的结构光图; 然后再使用视觉传感器进行图像采集, 从而获得待测物体表面以及物体的参考平面的结构光图像投影信息; 最后, 利用三角测量原理、图像处理等技术对获取到的图像数据进行处理, 计算出物体表面的深度信息, 从而实现二维图像到三维图像的转换。按照投影图像的不同, 结构光法可分为:点结构光法、线结构光法、面结构光法、网络结构光和彩色结构光。
3、阴影法
阴影法是一种简单、可靠、低功耗的重建物体三维模型的方法。这是一种基于弱结构光的方法, 与传统的结构光法相比, 这种方法要求非常低, 只需要将一台相机面向被灯光照射的物体, 通过移动光源前面的物体来捕获移动的阴影, 再观察阴影的空间位置, 从而重建出物体的三维结构模型。
4、TOF技术
TOF (Time of flight)法是主动测距技术的一种, 可从发射极向物体发射脉冲光, 遇到物体反射后, 接收器收到反射光时停止计时, 由于光和声在空气中的传播速度是不变的, 从而通过发射到接收的时间差来确定物体的距离, 进而确定产生的深度信息, 其原理如下式所示:
其中, 表示脉冲的波长; 表示波长的个数; 表示脉冲返回时的相位; 表示物体离发射之间的距离。
5、雷达技术
雷达作为一种很常见的主动视觉传感器, 可以通过发射和接收的光束之间的时间差来计算物体的距离、深度等信息。原理如下式所示:
式中, 为光速; Δt为发射与接受的时间间隔; 表示雷达到物体之间的距离。
6、Kinect技术
Kinect传感器是最近几年发展比较迅速的一种消费级的3D摄像机, 它是直接利用镭射光散斑测距的方法获取场景的深度信息,Kinect传感器如下图所示.Kinect传感器中间的镜头为摄像机, 左右两端的镜头被称为3D深度感应器, 具有追焦的功能, 可以同时获取深度信息、彩色信息、以及其他信息等。Kinect在使用前需要进行提前标定, 大多数标定都采用张正友标定法。

基于被动视觉的三维重建技术
1、根据相机数目分类
基于被动视觉的三维重建技术是通过视觉传感器(一台或多台相机)获取图像序列, 进而进行三维重建的一种技术。这种技术首先通过视觉传感器(一台或多台相机)获取图像序列, 然后提取其中有用的信息, 最后, 对这些信息进行逆向工程的建模, 从而重建出物体的三维结构模型。
1.1 单目视觉法
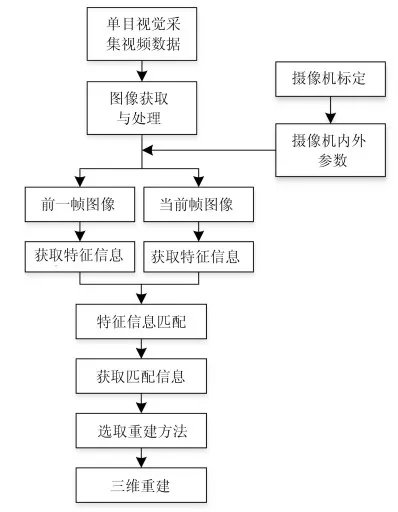
单目视觉是仅使用一台相机进行三维重建的方法,为了进一步表示空间中任意一个三维点在世界坐标系转换到二维图像坐标系之间的关系, 关系坐标可以表示为:
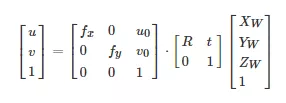
其中, (XW,YW,ZW)为空间中的三维点; (R t)称为旋转矩阵和平移向量; 和是摄像机在两个方向上的焦距; (u0,v0)是摄像头主点在图像坐标系下的坐标; (u,v)是图像坐标系下的坐标; 从而通过上式可以求解出任意空间一点的三维坐标.基于单目视觉的三维重建流程如下图所示。
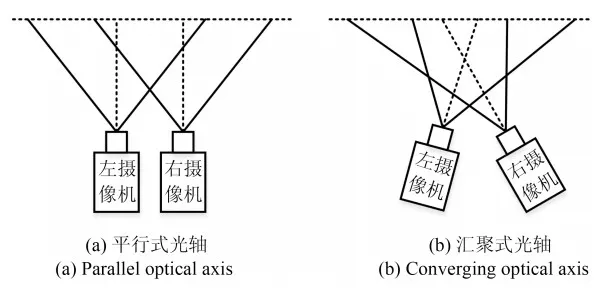
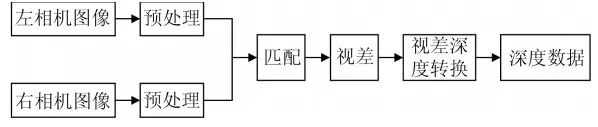
1.2 双目视觉法
双目视觉的工作原理来源于人类的双目视觉系统, 也就是说从不同的视角通过两个相同的相机捕获同一个位置下的左右两侧图像, 然后再利用三角测量原理获取物体的深度信息, 通过这些深度信息重建出物体的三维模型。目前, 基于双目视觉的三维重建方法是三维重建技术中的热点和难点。
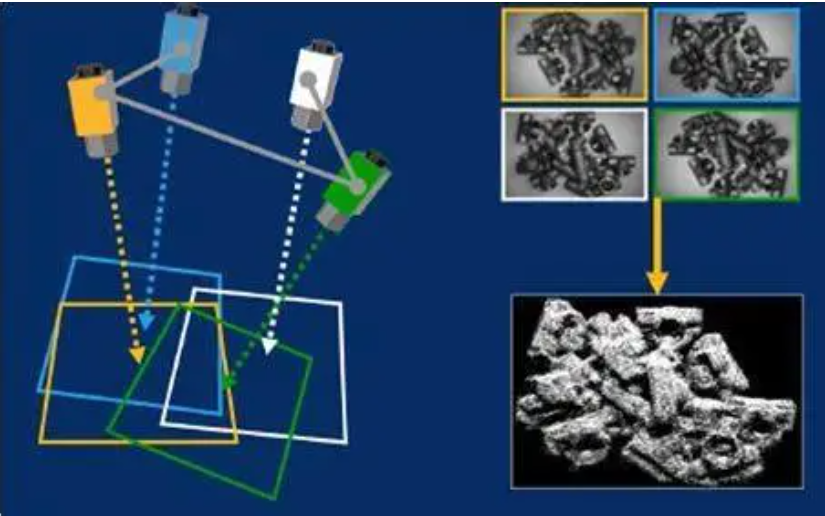
1.3、多目视觉法
2、根据匹配方法分类
2.1 区域视觉法
2.2 特征视觉法
3、根据应用方法分类
3.1 运动恢复结构法
3.2 机器学习法












![]()
2001-2009 Vogel Industry Media版权所有 京ICP备12020067号-15 京公网安备110102001177号


获取更多评论