基于动态光学跟踪的零部件质心测量技术
在汽车研发过程中, 整车NVH(噪声、振动与声振粗糙度)是衡量汽车质量的一个综合性问题。整车NVH 较大程度上受汽车零部件的质心位置偏差影响。在整车及零部件设计验证阶段,质心坐标是其中重要的验证参数之一。在整车研发过程中,传统的质心测量方法在效率和精度上逐渐难以满足要求,而基于动态双目视觉光学跟踪的质心测量方法在效率和精度上均有较大提升。
基本原理
1. 悬挂重垂线模拟
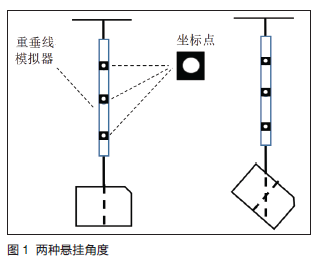
采用悬挂法从不同角度悬挂被测零部件(图1),用“重锤线模拟器”模拟出2 个不同方向的重垂线,二者的交点即为零部件重心。重垂线模拟器是一条垂线与轴线经过校准的圆柱形工具,上面粘贴有可以被摄像机识别的坐标点。坐标点拟合的直线即为重垂线。
2. 双目立体视觉测量
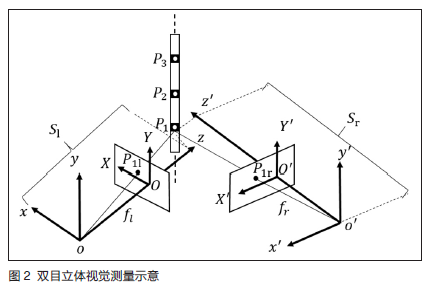
双目立体视觉是由两个摄像机从不同角度拍摄目标物体,根据三角测量法原理分析两个摄像机中的成像信息,从而计算出目标物体的位置。如图2 所示为双目立体视觉原理示意图,坐标系o -xyz 为左侧摄像机所在坐标系,o -xyz 为左侧摄像机成像平面所在坐标系,o -x′y′z′为右侧摄像机所在坐标系,o -x′y′z′为右侧摄像机所在成像平面;f l 、f r 为摄像机焦距,P 1 为目标测量点在坐标系o -xyz 中坐标记为(X,Y,Z ),在坐标系o -x′y′z′中坐标记为(X′Y′Z′),P 1l、P 1r 分别为P1 在左右两侧摄像机成像平面上的成像点,坐标分别记为(X 1l,Y 1l,,Z 1l),( X 1r,Y 1r,,Z 1r)。
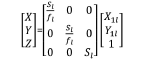
根据成像投影模型结合空间三角关系,对于左侧有X =S l/fl×X 1l, Y =Sl/fl×Y 1l,Z = Sl/fl×Z 1l,化简并改写为矩阵形式:
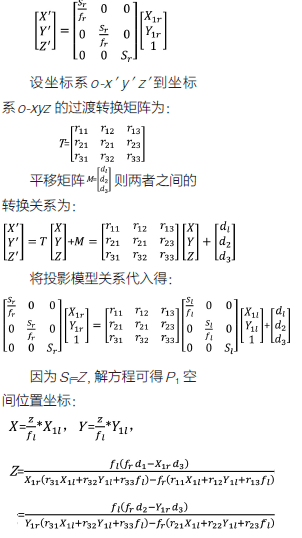
同理,对于右侧有
3. 迭代法计算质心坐标
采用双目动态跟踪测得重垂线模拟器上三个点的坐标后,可用最小二乘法拟合出重垂线。考虑到,在实际测量中两条模拟重垂线为异面直线,没有实际交点,采用迭代法计算质心坐标,将两条重垂线分别表示为
在两条重垂线上分别取点(X 1,Y 1,Z 1),(X 2,Y 2,Z 2), 计算两点间距l 12,X 方向设置迭代步长记为δx , 取δx 分别为±1,可计算出四种情形下两点间距l 12',其中最小间距对应的δx 正负情况即为正确的迭代方向。为保证测量精度,确定迭代方向后的迭代步长应根据要求设置,通常情况下应不大于0.1 mm。设置迭代终止条件为:l 12 >l 12'。迭代终止时重垂线上两点中点即为测得的质心坐标。
在汽车零部件质心测量上的应用
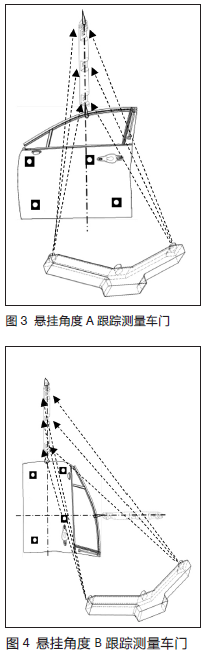
如图3、图4 所示,采用动态跟踪法测量车门质心坐标。在进行跟踪测量前,在被测零部件上粘贴3 ~ 4 个坐标点,这些点用来对齐不同角度下的坐标系。然后将被测量件吊装悬挂,接着将重垂线模拟器上坐标点的方向转到与被测量件上坐标点方向一致,最后将坐标点跟踪器置于适当位置并拍摄坐标点位置。完成后,将被测零部件换一个角度吊装悬挂,用同样的方法拍摄坐标点的位置。根据最小二乘法拟合重垂线后,用迭代法计算出质心坐标。
使用该方法测量零部件质心,采用动态跟踪的方式进行测量,不需要等待悬挂零部件静止,此外每次测量仅需要拍摄两次即可完成,在效率上有极大提高。由于是采用无接触式测量,测量过程也不会对重垂线模拟器产生扰动,重垂线模拟器经过高精度校准,所以在测量精度上相对传统测量方法也有显著提高。
小结
动态跟踪法测量零部件质心,使用基础的悬挂法进行测量,在此基础上采用专用工具模拟重垂线,使用双目立体视觉原理进行目标的测量和跟踪,用最小二乘法及迭代法处理测量数据从而计算出质心坐标,在测量效率和测量精度上均有较大提升。使整车及零部件NVH 设计验证环节更加高效精准。












![]()
2001-2009 Vogel Industry Media版权所有 京ICP备12020067号-15 京公网安备110102001177号


获取更多评论