Velodyne发布全新Vella开发套件版本 简化构建自动驾驶解决方案
据外媒报道,Velodyne Lidar发布Vella开发套件(VDK)全新版本,可简化构建自动驾驶解决方案。该VDK可允许访问Vella感知软件,且能与Velodyne的一流激光雷达传感器匹配。该软件工具包还展示了Velodyne的软件功能,允许客户使用现成的函数库插入Velodyne的激光雷达。

(图片来源:Velodyne)
该VDK先进解决方案可加快尖端激光雷达功能在众多领域的应用时间,如自动驾驶汽车、高级驾驶辅助系统(ADAS)、移动交付设备、工业机器人、无人机等。
自推出以来,客户已将该VDK用于短距离行人检测、交叉参考和与基于摄像头的感知融合,以用于ADAS和工业应用的防撞等。
全新VDK的功能如下:
支持基于高级RISC机器(ARM)的硬件,特别是NVIDIA Jetson Xavier AGX模块。其中,NVIDIA Jetson AGX Xavier模块可在紧凑节能的模块中提供具有超强计算能力的GPU工作站。该模块还可使一些VDK算法能够以较低的帧速率运行,并实时处理激光雷达帧,以检测、分类和提取对象。
由于外形较小且功耗较低,很多机器人和汽车客户都使用基于ARM的平台以及低功耗图形处理单元(GPU)。凭借AGX上的VDK支持,客户现在可以将Velodyne的激光雷达感知直接集成到现有工业自动引导车(AGV)和自动驾驶移动机器人(AMR)等较小平台上的应用程序中。保持不同功能的高精度和保真度,以及同时优化低功耗设备的运行性能非常具有挑战。但随着算法的不断优化,未来版本中的VDK将在其他低功耗计算平台上得到支持。
(图片来源:Velodyne)
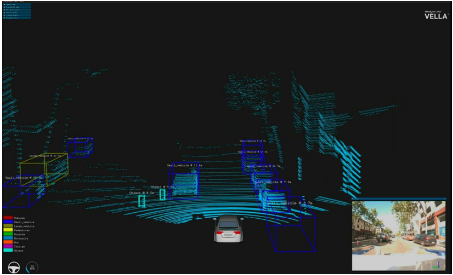
改进的图形用户界面(GUI)具有增强的用户选项,可实时可视化VDK结果。此版本的VDK具有经过全面修改的GUI,具有更好的3D渲染质量、流畅的控制以控制3D视图,并且用户可以从当前视点(例如前视图或顶视图)中进行选择。该GUI可在菜单提供多个选项,并显示平台的速度/转动。此外,该GUI还非常轻巧且功能强大。改进版GUI可帮助用户轻松了解3D场景以及VDK功能,提高在遮挡和远场等难以可视化的情况下的性能。
目前,基准测试结果可根据客户要求提供。为了向用户提供性能指标,Velodyne在多个环境中编译了数据集,从受控场景(如驾驶轨道)到高速公路上的高速交通,再到超级拥挤的城市中心。该数据集提供了比NuScenes和KITTI等现有公共数据集更多不同的场景。虽然这些数据集非常普遍,但种类和范围有限,且收集传感器为Velodyne的旋转传感器,而非方向传感器。通过这些基准测试结果,用户能够了解VDK的性能预期,从而可以围绕这些性能指标设计应用程序。
使用精确时间协议(PTP)进行时间同步。Velodyne的大多数客户都在其用例中使用多种传感器,例如GPS、IMU、摄像头、雷达和激光雷达。最关键的要求之一是对所有这些传感器的数据进行时间同步。最近,Velodyne传感器已开始支持PTP,以便使用主时钟对点进行时间戳记,助力传感器同步,从而使VDK输出与其他传感器同步。在未来的版本中,我们将提供跨传感器感知功能。
-


(图片来源:Velodyne)












![]()
2001-2009 Vogel Industry Media版权所有 京ICP备12020067号-15 京公网安备110102001177号


获取更多评论