
基于驾驶员在环技术的驾驶模拟器
基于驾驶员在环技术的驾驶模拟器集实时仿真技术、虚拟现实技术、机电一体化技术、计算机技术、传感器技术和通信技术于一体,通过搭建高性能实时动态闭环测试环境,结合驾驶员的实际操作和感受,实现了对车辆、道路和交通环境的模拟,可以用于研究、测试、分析和重现“人-车-路-交通”在实际车辆驾驶中的相互作用,为主动安全系统开发提供了有力支持。
主动安全技术可以有效改进驾驶舒适性,提高汽车安全性,受到汽车制造商的普遍关注。主动安全技术的开发和测试受到了越来越广泛重视。
基于驾驶员在环技术的驾驶模拟器从“人-车-交通-环境”闭环系统的整体性能出发,支持对主动安全性能等进行仿真研究和开发,系统支持驾驶员直接参与试验,还可以基于MATLAB/Simulink开发出各种精确的仿真模型,实现对车辆状态及驾驶员的视觉、听觉、运动感觉及触觉的模拟,使试验更接近于实车试验,在某些方面可以达到90%的吻合度,有效提高了开发效率和安全性,降低了开发成本。
系统构成
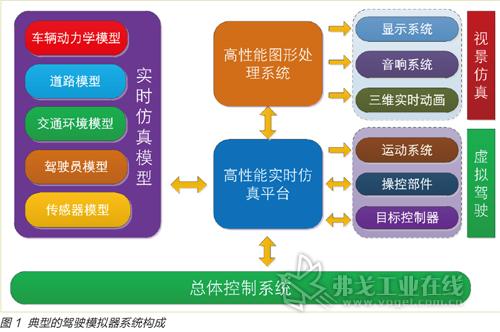
典型的驾驶模拟器系统包括实时仿真系统、实时仿真模型、视景仿真系统、虚拟驾驶系统和总体控制系统等子系统(见图1)。
1. 实时仿真平台
实时仿真系统是驾驶模拟器的中枢,由实时处理器、实时I/O板卡、信号调理板卡和电源系统构成,可以进行快速的数据运算。系统通过I/O板卡采集传感器返回的各种信号,并转换得到符合要求的数字信号作为模型的输入。通过仿真运算,系统得到各类参数并进行转换,得到符合输出要求的各种控制信息和状态信息,实现驾驶的模拟。
2. 实时仿真模型
实时仿真模型包括车辆动力学模型、道路模型、环境模型、驾驶员模型和传感器模型。其中,车辆、道路、交通环境和驾驶员的参数可以通过参数设置界面进行设置,满足各种工况下的性能测试需求。实时仿真模型还实现了车辆运行环境的模拟,控制运动平台的运动和三维实时动画的状态。
3. 视景仿真系统
视景仿真系统由图形工作站、显示系统、音响系统和三维实时动画构成。系统接收实时仿真系统运算,可得到车辆运行状态数据,调整视景仿真系统摄像机的运动状态,通过视景渲染将三维场景在显示系统实时反应出来,模拟真实驾驶路况。系统还可以根据车辆运行状态,调用声音库中不同类型的声音特效,通过音响系统模拟车辆行驶中的各种声音,如发动机声、点火声音和风阻声音等。
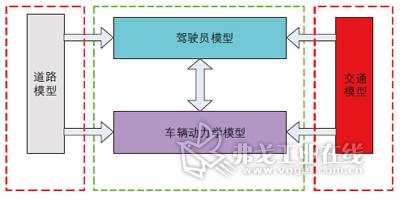
图2 实时仿真模型
4. 虚拟驾驶系统
虚拟驾驶系统是驾驶模拟器的人机互动平台,主要由运动系统、虚拟驾驶舱/操控部件和目标控制器组成。其中,运动系统当前的主流为六自由度电动平台,虚拟驾驶舱可以采用操控部件,简易搭建车辆模型或者真车方案,实现“人-车-环境”的模拟。
5. 总体控制系统
总体控制系统由总体控制计算机、试验管理软件和试验监控软件组成,控制和监控整个系统的运行状态。总体控制系统的功能有:对下载模型参数化和定义下载模型的仿真工况;模型的编译和下载;实时仿真平台的控制功能;记录仿真过程需要的参数数据并备份;实时模型的运行并提取相关参数;通过虚拟控件可在线手动操作车辆行驶;仿真平台可利用驾驶员模型进行测试;对整个测试平台进行配置管理;测试者通过虚拟驾驶舱操纵车辆行驶,介入测试过程。
实时仿真模型
实时仿真模型(见图2)可以正确模拟真实的车辆行驶及其动力系统工作过程。
1. 车辆动力学模型
车辆动力学模型主要包括车体系统模型、底盘系统模型、轮胎系统模型、动力传动系统模型和空气动力学模型,具有实时求解的能力,还可以为运动平台和交通环境视景提供车辆动力学信息。
2. 道路交通模型
道路交通模型包含了各种试验道路,用户完全可以在道路模型里设计新的路面,如高附路面、低附路面、对开路面、对接路面、直道路面、圆周路面和坡道等。可以满足的仿真工况包括路面摩擦系数改变的工况、上坡和下坡工况仿真和路面含有洞坑的仿真。
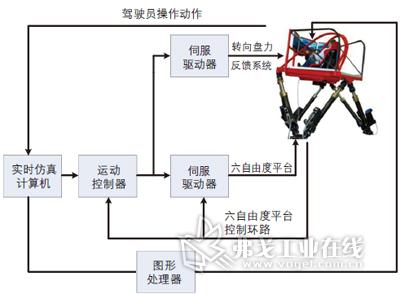
图3 动态驾驶模拟原理
3. 驾驶员模型
驾驶员行为可以通过调整人的特性来实现,例如经验、自发规避风险的愿望、响应和预瞄,也可以直接设置控制器参数来调整。
用户可以直接访问驾驶员数据库中不同驾驶员的参数或者通过Simulink界面访问。通过这种方法,用户可以定义控制器行为,从而改变仿真效果或者影响车辆状态变量。
驾驶员模型仿真了真实驾驶员的各类操作,可以实时仿真驾驶员的转向操作、制动操作、加速操作以及换挡操作。
4. 交通环境模型
交通环境模型被设计用于仿真交通环境,从而测试与环境传感器相关的驾驶员辅助系统。
不同的交通场景包括若干同道车辆以及若干可以方便配置的障碍物。交通车辆支持多种驾驶任务,比如触发的车速变化、变道或者这些动作的组合,提供预先选择交通环境的可能性,提供图形化的用户界面,用于设置特定场景所需的大部分重要参数(车速和距离),并可以设置包括车辆类型,驾驶任务以及动画外形和颜色等的所有参数。
三维实时动画
三维实时动画软件基于OpenGL技术开发,是一套基于C++平台的应用程序接口(API),可以更加快速、便捷地创建高性能、跨平台的交互式图形程序;通过以太网实现与实时仿真系统的数据交互,可以正确显示模型所运行的交通环境,并且支持车辆行驶过程中的声音模拟。
软件包含的主要功能模块有:
(1)声音模块:模拟车辆行驶过程中的声音,如点火声音、加速声音、发动机声音及风阻声音等;
(2)图形模块:负责三维仿真场景及当时空气条件的仿真;
(3)物理引擎模块:负责虚拟车辆与虚拟环境中物理数学模型的效果,实现如碰撞检测等;
(4)通信模块:通过以太网接收实时仿真系统发出的车辆运行状态数据,满足模拟驾驶的交互性和实时性要求。
运动系统
人体的运动感觉是驾驶员感知车辆运动状态的主要信息之一,在模拟驾驶中是十分重要的一环,它逼真地反映了车辆驾驶过程中驾驶员机体的各种感觉。六自由度平台在模拟的性能范围内给虚拟驾驶人员提供过载感觉和一定范围内姿态角变化的动感信息的能力,从而在运动突发和姿态变化的感觉与在实车驾驶的感觉相似。
动感平台在实时仿真系统的检测和控制下运行。首先,驾驶员通过视景仿真系统感知车辆运行状态,并做出相应的操控动作。实时仿真系统接收操控动作并进行运算,得到期望动感运动参数,如横摆运动。该运动参数传输给运动控制计算机,运动计算机通过运动学反解计算出6个电动缸的运动参数(电动缸位移量)。运动计算机根据6个电动缸运动参数和6个电动缸的位移反馈量,驱动6个伺服驱动器,实现6个电动缸闭环位置控制,使6个电动缸达到所要求的位移量,那么动感平台也就达到了所期望的运动姿态,实现动态驾驶模拟(见图3)。
由于驾驶模拟器运动平台的运动范围有限,不可能完全复现被模拟对象的真实运动轨迹,需要采用Washout滤波算法,在尽量不影响驾驶者感觉的情况下,将被模拟对象的实际运动转换成模拟器能够实现的信号。Washout滤波算法的基本原则是:将实际运动加速度中的高频分量由运动平台的运动加速度实现,将实际运动加速度中的低频分量由运动平台的倾斜来实现,二者之和与实际运动接近。车辆常规行驶时,纵向和侧向加速度的85%都分布在0.3 g之内,系统以满足这一标准为目标。
典型案例
在2012北京汽车展上,长安汽车展示出了自行开发的主动安全技术和其他车辆新技术。技术展示的主要内容包括智能巡航系统(ICC)、避撞辅助系统(CAA)、盲区检测系统(BSD)、车道偏离预警系统(LDW)、夜视系统(NV)、无线充电系统(WCS)和全液晶仪表。基于驾驶员在环技术的驾驶模拟器提供了综合的模拟环境,可以逼真模拟车辆的运行状态,结合长安自行开发的主动安全控制器,使观众能够真实体验主动安全技术的乐趣。





![]()
2001-2009 Vogel Industry Media版权所有 京ICP备12020067号-15 京公网安备110102001177号


没有更多评论了