并不遥远的未来 未来交通科技之自动驾驶
前言:
人类在过去200年里创造的技术成就远超过人类历史上的其他时期,人类文明被一群充满理想和热情的个人英雄推动向前。现在人类已经形成了一种新的生存策略,即通过脑力劳动来摆脱自然环境带来的麻烦、使自己的意图更容易得以实现。300年前,人类还只能依赖强大的精神力量和宗教信仰才能直面艰苦的生存环境。
作为一个不断寻求新鲜刺激、新知冒险的人,我总是对20世纪初的大冒险时代充满了憧憬。那时科学的研究方法已经成熟,在资本的推动下工业技术得到快速发展,人类从机械中获得了驰骋陆地、海洋和天空的力量。冒险家们用金属的车轮和翅膀到达了地球上的每一个地方,人类的足迹空前的拓展,在此过程中,先驱们也在浪漫主义的冒险精神中寻求个人英雄的灵魂归宿。而100年后,技术向更高深的领域发展,个人能力已经淹没在浩渺的技术海洋中。21世纪已经变成个人英雄主义幻灭的时代,个人的能力被磨灭。
不过,新时代有新时代的英雄,可能不是个人而是团体。如果关注科技潮流你会在新技术发表会上看到众多新秀、奇才。演说的可能只是一个人,但是背后工作的却是一个团队,其实直到今天人们也从理想上希望看到个人英雄,于是乔布斯的神话诞生了。乔布斯相比一些技术领域的新秀更像是成功的营销策划人,他总能想出很好的营销点子,而对人类生活变革或者技术进步的推动作用并没有普众理想中的那么大,背后将他的点子变成现实,一直在从事基础研究的幕后工作者则无人问津。不过,为了达到在普众中推动科学认知而使用具有华丽外表和丰富功能的产品这种做法的作用确实不可忽视,营销商人在某种程度上起到了科普的神奇作用。回到科学领域,技术新秀中有人开发了供移植的人造内脏、高级的AI算法、新材料,有人发现了质量的源头-“希格斯玻色子”、“好奇号”火星探测器登陆火星等等,当然这里面也包括许多交通领域的新成果。这些新成果在不久的将来会改变你我的出行方式,使从A点到B点会像高中物理题里设想的一样简单,不再过多的考虑中间的过程。
在未来,交通会变成一种什么样子可能每个人心中都有一些自己的想法,而我想做的是通过我个人鄙陋而浅薄的知识描绘一个简单的未来交通模型,把我想象中的未来交通样貌描绘给各位。在此基础上,网络中的隐藏的能人会将这个干瘪的枯枝丰满起来,这样一个生动的未来智能交通系统会呈现在我们的面前,业内人士的思路也许会得到拓展,今天的愿望在明天变成现实的可能性又增加了一分
自动驾驶车辆
在所有的未来交通技术中我认为最令人兴奋的还是自动驾驶,从汽车诞生不久起,自动驾驶的愿望就在人类的内心中萌生,过去的几十年里这个愿望一直被深埋在人们的心里,因为人们觉得要实现这个梦想还太遥远。今天,自动驾驶已经变为现实,只是它还不太成熟。至少在有生之年能够使用自动驾驶汽车这一点就足以让人感到期待。

目前量产车上已经部分实现
自动驾驶的部分功能在今天已经装备在很多量产车上了,例如主动巡航、城市安全、车道保持等等。所以我们先从这些基本技术说起。

ACC主动巡航依靠毫米波雷达探测前方距离
ACC主动巡航是一种革命性的装置,通过毫米波雷达探测前面障碍物的距离并会实现主动刹车。类似功能的首次大范围应用应该是在奔驰S上。在国内由于军方限制了毫米波雷达的频段所以该功能一直未能进入中国市场,直到最近军方开放了该频段才有大量毫米波雷达装车。

车道保持通过摄像头识别车道线
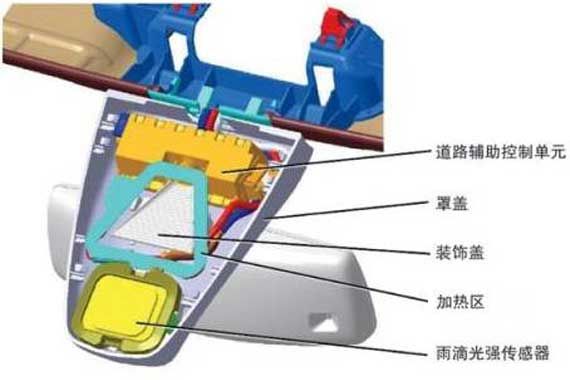
车道保持摄像头的结构图
车道保持是一种视频信号处理技术,通过摄像头捕捉道路图像随后由处理器分析出其中的车道线,当车辆的中心线在规定距离外与车道线重叠时将修正信号传递给方向盘,方向盘自动修正偏航提示驾驶员偏离车道。

夜晚和雨天摄像头的辨识率会下降
不过由于采用摄像头的识别方式在识别准确度上还不是很理想,夜间、雨天车道线颜色和道路颜色比较贴近的时候摄像头就无法准确的分辨出车道线。

车载摄像头可以辨识道路上的限速标志
即便如此,摄像头就如同车辆的眼睛,大部分的识别功能都要通过摄像头来实现,包括交通标识的辨识。目前很多高端车已经配置了限速标识辨识功能,车辆的摄像头可以识别出路边的限速标识,并将其内容提示在车辆的仪表盘上。遗憾的是这种功能在中国尚未开通。

一些车辆的也是摄像头已经具备行人辨识功能
行人识别是摄像头的另一个重要功能,在很多带红外夜视摄像头的车辆上已经可以辨识行人,在也是屏幕上可以标定出行人的位置。
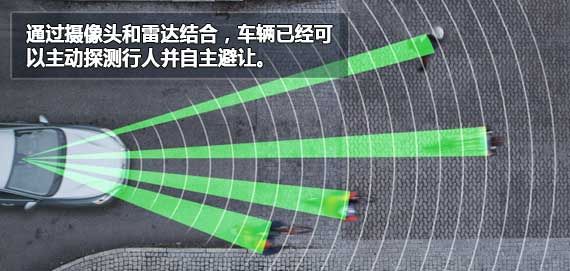
摄像头和雷达结合的行人识别系统已经实用化
而另外一些厂家已经推出了基于摄像头和雷达的行人安全系统,该装置可以辨识行人并判定行人的距离,对于进入行车轨迹的行人车辆可以自动减速或者停车。
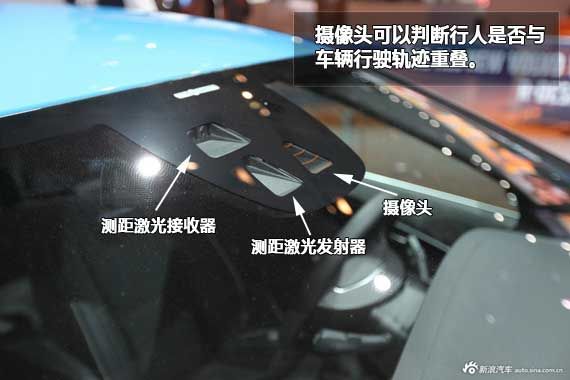
摄像头用于辨识行人,激光测距用于判断前方车距

车头的雷达可以更精确的判断车辆与物体的距离

车辆对行人的主动响应已经很接近自动驾驶的一些功能
对于车来说摄像头和人类的眼睛一样,可以辨识,但是单个摄像头就像人类的单眼一样不能精确的衡量距离。为了弥补摄像头的距离判断缺陷引入了毫米波雷达。在二者的共同作用下车辆就可以判断车和行人距离。

目前的自动泊车技术已经不仅限于电脑控制方向盘停进车位
目前另一些新技术同样让人感到神奇,通过手机应用可以让车辆自动进入车库寻找车位并停好,这已经不是科幻电影里的内容了。在架设了信号支持的停车场,车辆可以自己去找车位,也会自己从车位里开出来到门口接车主。

把现有的主动安全技术放在一辆车里也不能实现自动驾驶
如果把目前这些已经实用化的技术都装到一辆车上,这台车就可以实现自动驾驶了么?显然还不行。自动驾驶还要处理复杂的道路情况、制定路线、应激响应等。而Google团队研制的自动驾驶车辆才真正实现了无人驾驶,截止目前它已经安全行驶了超过50万公里。

来自斯坦福的自动驾驶研究团队

斯坦福大学的无人驾驶途锐在比赛中第一个跑完213公里的赛程
说到Google自动驾驶研究团队,他的成员都是来自鼎鼎大名的斯坦福大学人工智能研究团队的人物,这个团队就是05年获得美国国防部举办的“Grand Challenge”无人驾驶汽车比赛冠军的团队。

无人驾驶汽车项目负责人Sebastian Thrun
Sebastian Thrun是该团队的负责人,在他的介绍中提到之所以立志开发自动驾驶汽车是因为他的一个朋友死于交通意外,从此开发机器驾驶的汽车杜绝交通事故就成为了他的追求。
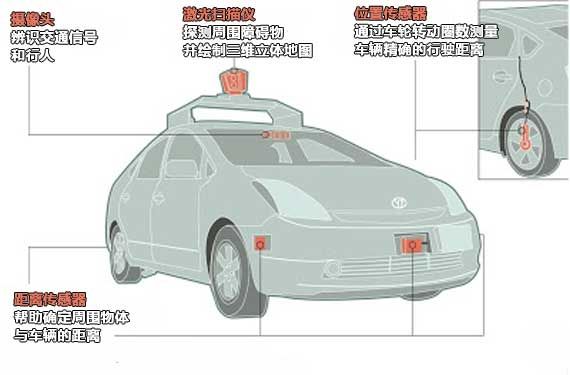
构成自动驾驶汽车的主要部件
Google自动驾驶汽车由几大主要部件构成,它们分别是:激光扫描仪、高精度GPS定位器、摄像头、测距雷达和车轮行程传感器。

通过激光扫描仪和GPS接收器感知周围的环境和自己的位置
激光扫描仪和GPS定位器是自动驾驶车辆的核心部件,正是这两个部件的共同运作让车辆能够感知周围的环境和车辆现在的位置。
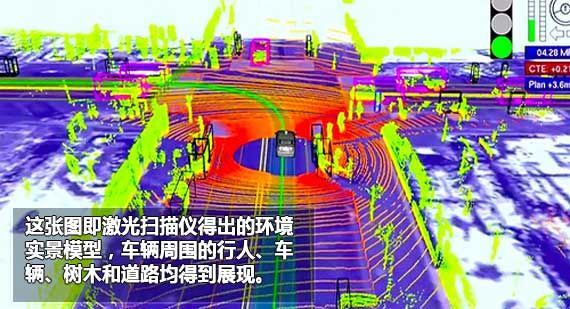
自动驾驶车辆看到的世界是这样的
上图中展示的就是自动驾驶车辆看到的环境,激光扫描仪可以探测到车辆周围的所有物体,包括车辆、行人、树木、路缘等等。摄像头可以辨识交通信号,车身周围的雷达则感应离车辆较近的障碍物。
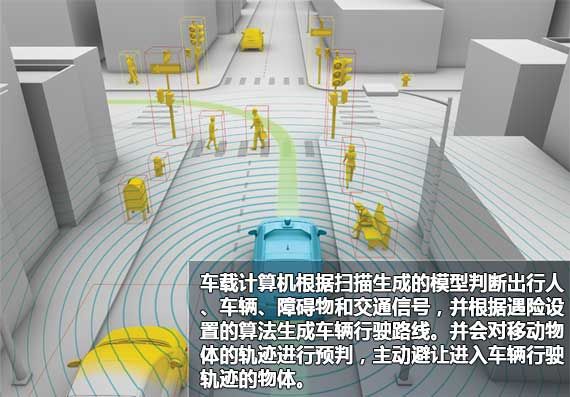
计算机通过传回的环境模型制定行车路线
车载计算机根据各种传感器传回的信息设置车辆合理的行驶路线和障碍物规避策略,自动驾驶车辆根据技术人员设置的算法行驶在马路上,它可以主动的选择道路、超车并线、避让行人和障碍物。

目前Google无人驾驶汽车已经可在美国三个州的公路上合法行驶

自动驾驶汽车的公路礼仪远超很多人类驾驶员
目前Google自动驾驶汽车的表现良好,在几年的测试中累计行驶50万公里并且从未出过事故。在美国已经有三个州的法律允许Google自动驾驶汽车在公共道路上行驶,分别是内华达、佛罗里达和加利福尼亚。照这个趋势美国其他州通过自动驾驶汽车上路的法案只是时间问题。

Google自动驾驶汽车宣全片中盲人Steve享受了自动驾驶汽车的便利
正是通过技术团队的努力,盲人也可以享受汽车带来的生活改变。靠Google自动驾驶汽车,盲人可以自行到达以前完全无法抵达的地方。

自动驾驶车队的车辆目前仍在道路上进行测试
目前Google自动驾驶汽车团队共拥有6辆自动驾驶车辆,分别是3辆普锐斯、1辆奥迪TT、2辆雷克萨斯RX450h。

各种各样的自动驾驶车辆都在道路上进行着测试

不久的将来自动驾驶车辆将进入我们的生活
除了Google的自动驾驶汽车,全世界各地的汽车企业、学校和科研机构都在进行着自动驾驶汽车的开发。他们的原理不尽相同,但是目的都是一个:让车辆自己行驶,使交通变得安全快捷。
当然,我认为自动驾驶也有尚未解决的问题:
1.不够智能的交通设施
为了分辨交通信号和各种交通标识,自动驾驶车辆必须有强大的图像分析能力,目前在中国的马路上都没有谁能说完全看得过来马路上所有的交通标识,甚至还有被树木遮挡的那些,何况一辆车。
为了解决这个问题,我认为智能的交通信号将成为自动驾驶系统的一部分,将来所有交通信号都能与车辆进行无线通信,这样就不需要复杂的图形辨识技术了。这部分内容将在下一章内详细讨论。
2.人类的不确定性
机器会严格执行人类设定的规则,这些规则又都是从全局利益出发而设置的。但是交通中无法完全避免人类的参与,而人类是具有自由意识的,不是按照规则行动的机器,而且很多人类的共性之一就是“自私”,个人利益可以凌驾于全局利益。那么当自动驾驶车辆遇到闯红灯的电动车、突然穿入高速公路的行人、不断加塞的有人驾驶车辆时恐怕也要寸步难行了。
在向完全的自动驾驶交通过渡的时候恐怕是人机矛盾最突出的时候,特别是在国民素质比较低的国家。机动车的增长与国民素质低下带来的矛盾都还异常突出,自动驾驶车辆的普及恐怕还需要较长的时间。
3.驾驶的乐趣
对于很多人类,驾驶车辆是他们获得乐趣的重要手段之一,全面的自动驾驶将抹杀他们获得乐趣的途径。而如果有人驾驶车辆和无人驾驶车辆在同一环境中行驶,上面所说的矛盾会更加突出。人的错误会导致机器的错误,如何在高效、安全的交通和个人乐趣之间取得平衡也是待商榷的问题。












![]()
2001-2009 Vogel Industry Media版权所有 京ICP备12020067号-15 京公网安备110102001177号


获取更多评论