自动驾驶芯片要变天?安霸5nm新品算力高达500 eTOPS
随着自动驾驶的快速发展,系统功能越来越复杂,对算力的要求也越来越高。
据相关分析数据显示,现阶段 L2 级别自动驾驶计算量已达10TOPS,L3 自动驾驶对芯片算力的需求约在 30 ~100TOPS 之间,L4/L5 则分别在 100/1000 TOPS 以上。对于高阶自动驾驶而言,高算力自动驾驶芯片已然成了落地的关键所在。
正因为如此,目前很多车企和技术提供商都将峰值算力作为了衡量自动驾驶芯片能力的重要指标,由此吸引各大芯片厂商纷纷加码研发大算力、高性能自动驾驶芯片。
近日,安霸在CES 2022上发布了全新的AI域控制器芯片 CV3 系列。该系列芯片基于5nm制程打造,AI等效算力达500eTOPS,能够支持ADAS和 L2+ 至 L4 级自动驾驶系统的研发。据安霸中国区总经理冯羽涛介绍,和以往一样,此次新推出的CV3 系列将包括多个不同的版本,此前亮相CES的CV3 - HIGH是该系列的高性能旗舰版产品,后续安霸将根据具体客户需求,对相关性能进行裁剪,进一步推出中端和入门级产品。
安霸首发CV3 系列,单芯片AI算力达500 eTOPS
作为安霸最新 AI 域控制器芯片,CV3系列芯片采用了5nm制程,基于完全可扩展、高能效比的 CVflow® 架构,可实现500 eTOPS AI算力,比安霸上一代车规级 SoC CV2 系列提高了 42 倍,而功耗仅为50W,相当于能效比只有10 eTOPS/W,较CV2提升了4倍。
“这里的e指的是equivalent。因为我们的架构是特殊的架构,CVflow®不等同于任何GPU,这就导致CV3芯片AI算力的计数单位与大家常用的GPU的TOPS有所不同,这里加了e也就是说跟通用芯片架构相比,我们可以跑到等效的性能。” 冯羽涛指出。
这是什么概念呢?目前在自动驾驶领域备受青睐的英伟达Orin芯片,算力也只有254 TOPS,蔚来ET7通过四颗Orin级联也仅实现了1016 TOPS算力。而如果采用四颗CV3芯片级联,意味着可以实现2000 eTOPS的超高算力。正因为如此,对于这款芯片未来几年的市场前景,安霸也是信心十足。

CV3 - HIGH 架构图,图片来源:安霸
具体来看,相较于上一代CV2,CV3对CPU进行了大幅升级,搭载了多达 16 个 Arm® Cortex-A78AE CPU 内核,这是Arm最新推出的高性能CPU内核,由此使得CV3在支持自动驾驶系统的软件应用所需的 CPU 性能上,比CV2 提高了 30 倍。
在设计上,安霸将这16 个 Arm® Cortex-A78AE分成了四个集群,每个集群4个核,用于实现不同的功能,从而使软件开发相对较独立,并且还可以互为冗余,提升安全性。例如,可以用一个集群做安全岛,一个集群负责神经网络以及视觉感知,一个集群用于融合。
“现在我们第一颗芯片虽然有4个集群共16个核,但将来真正落地的时候,如果客户不需要这么多,也是可以裁剪的。” 冯羽涛表示。不仅如此,CV3还加入了HSM模块。在冯羽涛看来,未来在汽车域控制器里,HSM将是必须的硬件安全模块。
另外,CV3还应用了安霸全新一代CVflow®架构,其中对神经矢量处理器NVP和通用矢量处理器GVP进行了专门的区分,从而更好地分工协作,满足不同客户的算法开发需求。据冯羽涛介绍,就应用而言,NVP主要是针对卷积神经网络运算,可以运行先进的神经网络算法,而GVP则更擅长浮点运算、非神经网络计算,可以帮助 NVP 引擎分担传统算法等运算处理。CV3里有专用硬件加速用来跑傲酷的 4D 成像雷达 AI 算法。

CV3单芯片可实现 ADAS到L4 不同等级自动驾驶研发, 图片来源:安霸
为继续发挥安霸在图像处理领域的领先优势,CV3 系列亦搭载了其最新一代 ISP,可同时支持 20 路摄像头通过 MIPI VC 方式连接,并可以接入激光雷达、毫米波雷达、超声波雷达等自动驾驶传感器,进行多传感器的深度融合,通过单颗芯片实现 ADAS到L4 不同等级自动驾驶系统的研发。
在此过程中,冯羽涛指出,最大的挑战是如何让一个新平台同时适应不同的研发需求,并且兼顾功耗和成本。“做一颗超高算力的芯片,理论上只要拼很多核放进去一样可以实现很高的算力。但这种做法很难落地,因为真正应用的时候,会面临各种各样的瓶颈,包括功耗,包括成本,都是需要考虑的,而且这些也是评价一颗芯片最核心的几个指标。”
支持视觉和雷达前融合,大幅提升融合感知效果
2021年10月,安霸正式与傲酷雷达( Oculii)达成最终收购协议。通过此次收购,安霸得以将傲酷的算法部署在其 CVflow® 系列芯片上,从而将目标市场拓展至雷达感知与视觉融合领域。此次CV3的发布,可以说是双方合作的首个重要成果。
据安霸中国区市场营销副总裁郄建军介绍,通过对傲酷的收购,安霸在CV3系列中也加入了傲酷4D高精度雷达的算法,实现了4D成像雷达和视觉感知原始数据集的融合,这也是前一代产品所不具备的。
在视觉和雷达的融合方面,目前一般做法都是后融合或者目标级的融合。这类融合虽然对计算量和通信带宽的要求相对降低,但由于部分数据的舍弃使其准确性也有所下降。CV3基于卓越的 AI 处理性能可以做前融合,即对视频的像素和雷达的点云做原始数据级的融合,从而使融合感知的整体性能、置信度等大幅度提升,降低误检率、漏检率。
在郄建军看来,随着自动驾驶的快速发展,未来传感器融合可能都会朝着原始数据集前融合的方向发展。而CV3除了视觉和雷达的前融合,其实也可以支持激光雷达的前融合,具体视客户的需求而定。但无论如何,视觉都将是自动驾驶最重要的感知手段。
在智能驾驶领域,安霸布局由来已久,一直以来安霸坚持的都是“算法优先”。通过对VisLab和傲酷的收购,安霸先后入局了自动驾驶算法和雷达处理算法的研究,以深刻理解这些技术对于芯片的需求。

安霸汽车芯片,图片来源:安霸
除此之外,在图像处理和压缩以及AI加速算法等领域,安霸也积累了丰富的经验。尤其是图像处理,安霸已经拥有17年的研发经验,基于此安霸已经先后推出了多款基于视觉感知的车用芯片,包括不带AI处理器的A12、H22、H32,以及加入了安霸独有AI加速引擎设计的CV2x系列、CV5等。
其中CV2x系列采用了10nm制程,在前视ADAS、智能电子后视镜、DMS、OMS、行泊一体等领域有广泛的应用,例如RIVIAN、Motional、Arrival,都是安霸CV2芯片的合作伙伴。CV5是安霸首颗5nm制程芯片,已经于CES 2021正式推出,这意味着安霸的5nm芯片此前就已经经过了验证。
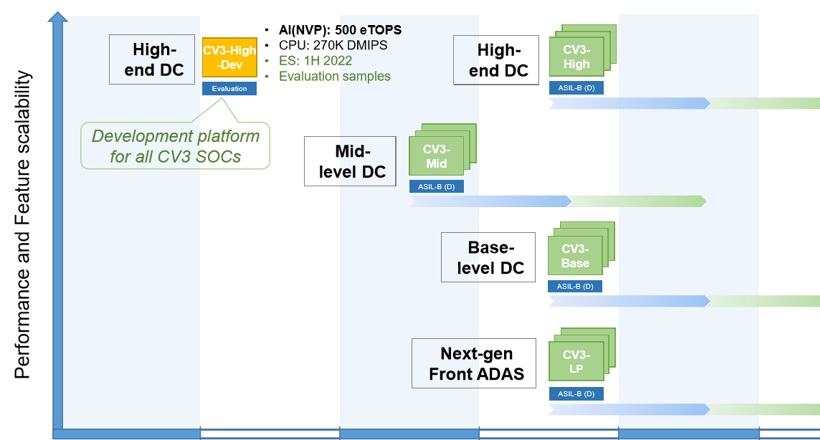
CV3系列芯片规划, 图片来源:安霸
尽管如此,冯羽涛指出,随着自动驾驶的快速发展,对芯片的算力、多传感器连接以及信息处理等的需求都在大幅提升,这些产品是远远无法满足高阶自动驾驶对中央域控制器的需求的,这也是为什么安霸要推出CV3。接下来,冯羽涛表示安霸将会结合客户实际的市场需求,对此次发布的旗舰级产品进行功能裁剪,降维应用于不同系统的开发,更好地满足当前百花齐放的自动驾驶市场。












![]()
2001-2009 Vogel Industry Media版权所有 京ICP备12020067号-15 京公网安备110102001177号


获取更多评论