知行科技发力行泊一体智能驾驶,加速全场景出行方案量产落地
尽管实现全场景的智能驾驶很难,但通过从单一场景着手,逐步连点成面,还是有很大可能趟出一条“血路”来。
2021年以来,包括蔚来、小鹏、理想、长城等在内的整车企业纷纷推出了各自的领航辅助驾驶,并不断升级迭代,拓宽应用边界。
仔细分析,这些企业无一不是先从高速以及城市快速路等特定场景着手,然后逐步向城市、泊车等更复杂的场景延伸,以逐步打通全场景的智能驾驶。比如小鹏汽车,此前已经宣布将于2022年上半年在部分地区开放城市NGP,另外蔚来、长城、智己等主流车企也有类似的规划。
而在整车厂之外,很多主流的自动驾驶解决方案提供商甚至选择了同时从商用车和乘用车两个领域着手布局自动驾驶,试图通过多场景联动逐步实现全场景的自动驾驶。这意味着,从单一场景向多场景或全场景融合发展已经成了自动驾驶行业的共识。
面对这一趋势,知行科技作为国内领先的智能出行科技公司亦在积极行动。目前,知行科技正在研发集NOA及AVP等行泊功能于一体的域控制器,旨在给予消费者多个不同场景之间无缝衔接的智能驾驶体验。据了解,该行泊一体解决方案分为基础版、标准版、旗舰版三个不同的版本,其中标准版算力可达40+TOPS,能支持NOA及HPA等功能,旗舰版算力可达100+TOPS,支持Urban NOA及AVP功能,标准版将于2022年在多家头部车企新车型上交付应用。
自动驾驶百花齐放,终极目标是打通全场景
因着技术的高度复杂性,自动驾驶从低速封闭向高速开放、从载物向载人逐级演进,渐进式落地,已经成了不争的事实。正是这样的发展规律,造就了当前自动驾驶多种技术路线并存的繁荣发展局面。
不过,自动驾驶各个细分赛道虽然参与者众,不可否认,最终这些玩家都将汇入同一个赛道,即打通全场景,研发全域全无人自动驾驶,这也是自动驾驶的终极目标所在。否则只要有ODD的存在,就无法称之为真正的自动驾驶。
自动驾驶的终极目标是实现全场景端到端的自动驾驶,图片来源:知行科技
但正如大家所见,打通全场景自动驾驶的愿景虽然很美好,要想顺利落地并不容易。
比较现实的问题是,每个场景有每个场景的know-how,如何通过一套自动驾驶系统实现跨场景应用,本身就面临很多挑战。另外从封闭区域向开放场景拓展,虽然听起来很简单,实际落地过程中亦困难重重,特别是开放场景中的corner case,充满了巧合性与不可预见性的边缘情况,可谓高阶自动驾驶发展最主要的掣肘。
为此,自成立知行科技就确立了软硬一体的全栈式高级自动驾驶辅助系统开发技术策略,打通了从核心算法、软硬件研发到系统集成测试验证的全栈能力。特别是算法,作为打造高安全、高可靠自动驾驶系统的关键所在,是知行科技布局的重中之重。
在算法方面,知行科技具备了全场景智能驾驶、深度学习和传统视觉相结合的多路径感知、多传感器感知融合、定位与规划、决策与控制、大数据闭环及算法训练、传感器参数动态矫正等多项算法能力的开发。
其中感知算法方面,结合不同的应用场景,知行科技对主流的传感器算法都开展了深入研究。针对市场主流泊车功能,知行科技自主研发了基于超声波雷达的环境感知和车辆定位算法。针对当前在量产车市场大热的高低速辅助驾驶,以及高级别L4级自动驾驶,知行科技研发了对应的视觉和激光雷达感知算法,以及动态图像拼接、影子模式验证、在线数据挖掘等环视和数据功能,以通过多传感融合实现更加复杂的路况感知,同时推进算法持续迭代。
特别值得一提的是,考虑到自动驾驶系统的性能表现强依赖于传感器的精度,而在整个车辆的生命周期中,难免会出现安装偏差,进而让系统性能下降。对此知行科技专门研发了传感器参数动态矫正算法,让车辆在正常行驶过程中可以实时修正传感器参数,同时也为售后市场提供经济便利的动态校准维护方案。
正是秉承着这样将每项核心技术挖掘到极致的态度,目前知行科技仅通过一个摄像头就可以实现包括ACC、AEB、 LKA、TJA、TSR、LDW等在内的ADAS功能,并成功推出了相关的L2量产方案。目前,L2已经有多个车型量产下线,获得新定点也超过了12个。
除此之外,针对更高阶的L2++以及L3/L4自动驾驶,知行科技也开展了相关的研发,包括结合新的电子电气架构演进趋势,开发高性能自动驾驶域控制器,助力全场景智能驾驶愿景的实现,其中部分解决方案也已实现规模化量产。

知行科技NOA测试车,图片来源:知行科技
助力全场景融合,知行科技研发行泊一体域控制器
在知行科技打造全场景智能驾驶的过程中,其行泊一体域控制器IDC占据了重要战略地位。该方案共分为三个不同的版本,旨在应对不同的客户需求,其中标准版是知行科技当前主推的版本。
该产品基于高级自动驾驶系统及软件架构向下兼容设计开发,算力可达40+TOPS,能灵活适配TDA4及EQ5H双SOC方案,最大支持7路8Mp摄像头、4路2Mp摄像头和1路DMS,以及多Radar和Lidar扩展,同时支持REM及高精地图和定位服务。
值得关注的是,这也是目前可量产智能驾驶系统主流的硬件配置方案,虽然在传感器配置数量上不同车企有不同的选择,但基于可扩展的设计思路,知行科技依然可以很好地满足不同车企的需求。而且知行科技的IDC域控制器还支持C-V2X以及4G/5G等多种通讯接口,并兼容目前主流的路端设备和通讯基站,具备直接接入V2X网络的能力,这意味着对于车路协同自动驾驶方案,该域控制器同样适用。就应用场景而言,可支持NOA导航辅助驾驶以及HPA自学习泊车等功能。
为加速行泊一体解决方案的规模化量产,知行科技正在研发NOA领航辅助驾驶和智能泊车系统。其中NOA领航辅助驾驶系统,传感器均采用了当前成熟的行车和泊车传感器以及控制器,包括知行科技自主研发的智能前视摄像头、自动驾驶域控制器,配合生态内的其它传感器及高精度地图等,实现稳定性能和成本之间的平衡。
图片来源:知行科技
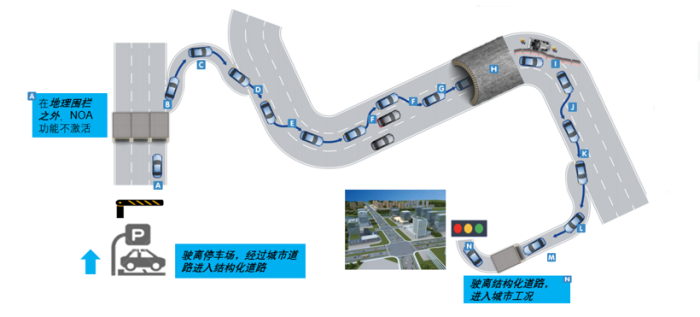
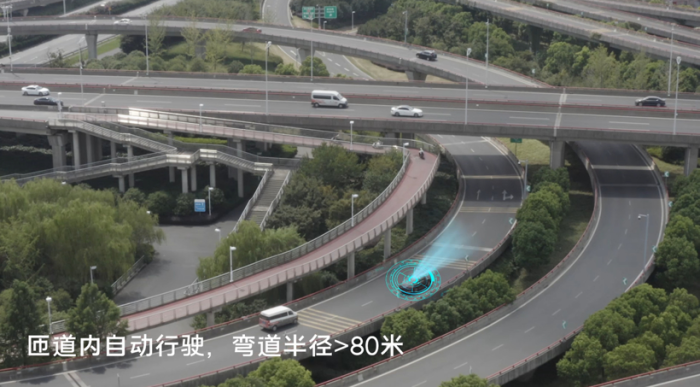
根据知行科技的规划,该NOA领航辅助驾驶将可以实现高速公路、城市快速路以及开放城市道路上端到端的高级驾驶辅助功能,这与当前主流车企的智能驾驶量产步伐基本一致。现阶段,知行科技的NOA导航辅助驾驶系统已经更新到3.0版本,可以实现在高速公路及城市快速路等结构化道路上按照导航规划的路径自动上下匝道、自动超车、车道保持、自动避让、弯道智能减速、接管提醒等功能,即将迎来的是4.0版本。目前已获多家头部OEM的量产项目定点。2022年下半年,知行科技NOA导航辅助驾驶系统将正式规模化量产。

图片来源:知行科技
在智能泊车方面,知行科技也规划了多个不同的版本,包括APA 自动泊车/遥控泊车、HPA自学习泊车、AVP 自动代客泊车等。其中APA可支持驾驶员在车内通过按键或者制动板接管车辆控制,或在车外通过手机、钥匙等遥控装置接管车辆控制,并具备泊车过程中针对行人及其他车辆的紧急制动。
HPA自学习泊车主要是针对家庭区域的泊车方案,使用该功能时,驾驶员需要先训练系统生成记忆轨迹,即先学习一遍泊车路线,之后只要车辆进入记忆区域,同时环境条件满足,且HPA功能提示可用,就可以开启记忆泊车功能。
知行科技基于IDC域控制器实现的HPA等低速泊车功能已获得奇瑞汽车的量产定点。除此之外,知行科技也在研发更高级的AVP自主代客泊车和城市NOA,并将相关功能与即将量产的高速NOA一起集成至下一代旗舰版行泊一体域控制器中,以真正实现全场景智能驾驶,覆盖更多的长尾场景。
以大数据闭环为驱动,赋能全场景智能驾驶量产
对于自动驾驶而言,大数据闭环将会成为量产决胜的正负手,搭建高效、低成本的数据智能体系不仅是自动驾驶健康发展的基础,也是自动驾驶系统能够不断迭代前行的重要环节。正是意识到这一点,近两年很多整车厂和自动驾驶技术提供商都在争相构建自动驾驶数据闭环,包括知行科技。
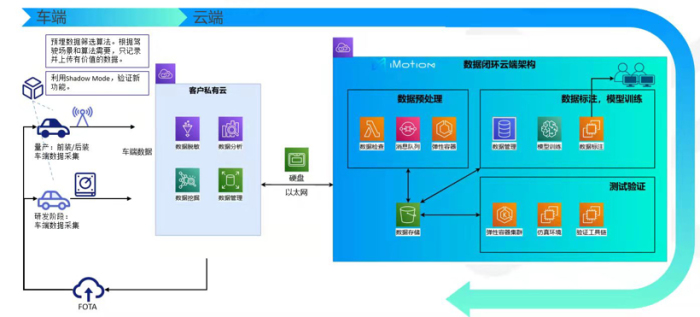
知行科技大数据闭环系统,图片来源:知行科技
由知行科技自主研发的数据闭环和云平台网络,采用了原生云架构的设计方式,具备极强的可扩展性,可实现与国家中心云平台的互通互联,具备天生上云的优势,这使得所有搭载知行科技解决方案的车辆数据都能做到可追溯、可监控。
为实现数据驱动自动驾驶发展,知行科技研发了专门的数据筛选算法,通过将该算法预埋在搭载了知行科技自动驾驶系统的量产车以及研发测试车上,系统可以根据驾驶场景和算法需要,记录并上传有价值的数据到云端,然后在云端进行数据的深度分析和挖掘。
由此产生的结果,一方面可帮助整车厂在后续实施OTA升级,持续向用户开放更多的自动驾驶功能,另一方面供知行科技进行模型训练、仿真测试及验证,持续优化迭代自动驾驶算法,开发更高级的自动驾驶系统,甚至探索UBI这样的新型商业模式。
其中通过数据回传,实现算法的不断优化尤为重要。特别是corner case的累积,可以帮助知行科技在后续大大提升应对此类场景的能力,更好地向全场景智能驾驶迈进。因为从demo到小批量,再到大规模的使用,即便是原来一些概率很小的事件,也有可能变成常发事件,这也是为什么现在整个行业都在死磕corner case。
目前,知行科技已经实现了L2以及L2++自动驾驶系统的规模化量产。其中基于单V的L2级自动驾驶辅助系统已在五菱E300、威马E5等车上实现量产。ADCU 行泊一体的自动驾驶解决方案也已经获得了多个量产项目,包括吉利极氪001等。通过这些量产车的大规模上路,可以进行大量真实场景的运行数据采集,驱动自动驾驶技术持续迭代,形成价值闭环。

知行科技园区自动驾驶智能底盘套件解决方案,图片来源:知行科技
不仅如此,知行科技也在同步开展高级别L4自动驾驶汽车的研发及测试,相关场景中产生的测试数据,同样可以上传到云端形成一个数据库,用于进行仿真测试及验证,最后打磨形成可量产的产品,然后在对应的场景中继续测试,不断优化系统性能,形成基于数据的研发闭环。
可以说,正是有了这样坚定的目标,以及坚实的全栈式技术底座,目前知行科技距离全场景智能驾驶的终极目标正越来越近。而在以知行科技为代表的本土自动驾驶科技公司的共同努力下,自动驾驶从单一场景向全场景应用演变已指日可待!












![]()
2001-2009 Vogel Industry Media版权所有 京ICP备12020067号-15 京公网安备110102001177号


获取更多评论